Налаштування пристрою
Сторінка "Пристрій" у налаштуваннях машини дозволяє зчитувати та застосовувати налаштування безпосередньо до вашого підключеного пристрою (контролера). Вони також відомі як "dollar settings" або налаштування $$ у GRBL.
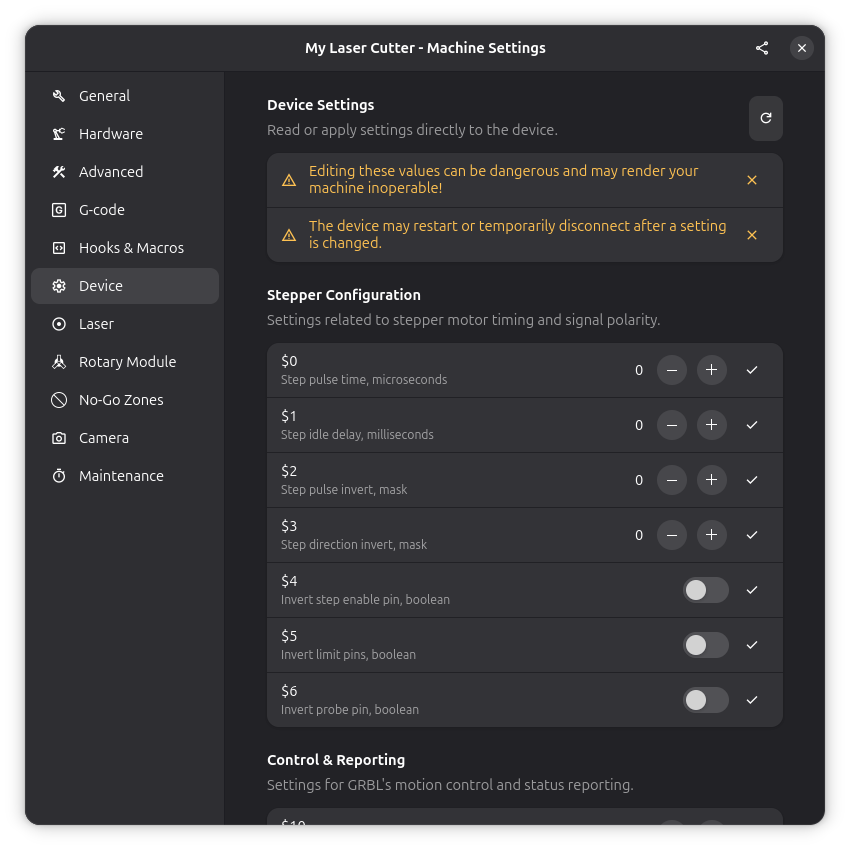
:::увага Обережно при зміні налаштувань Неправильні налаштування прошивки можуть призвести до непередбачуваної поведінки машини, втрати позиції або навіть пошкодження обладнання. Завжди записуйте вихідні значення перед внесенням змін і змінюйте одне налаштування за раз. :::
Огляд
Сторінка "Пристрій" забезпечує прямий доступ до налаштувань прошивки вашого контролера. Тут ви можете:
- Зчитувати поточні налаштування з пристрою
- Змінювати окремі налаштування
- Застосовувати зміни до пристрою
Налаштування прошивки контролюють:
- Параметри руху: Обмеження швидкості, прискорення, калібрування
- Кінцеві вимикачі: Поведінка homing, програмні/апаратні обмеження
- Керування лазером: Діапазон потужності, увімкнення режиму лазера
- Електрична конфігурація: Інверсія пінів, підтяжки
- Звітність: Формат та частота статусних повідомлень
Ці налаштування зберігаються на вашому контролері (не в Rayforge) і зберігаються після циклів живлення.
Зчитування налаштувань
Натисніть кнопку Зчитати з пристрою, щоб отримати поточні налаштування з підключеного контролера. Це вимагає:
- Підключення машини
- Щоб драйвер підтримував зчитування налаштувань пристрою
Застосування налаштувань
Після зміни налаштувань зміни застосовуються до пристрою. Пристрій може:
- Тимчасово перезавантажитися
- Відключитися та повторно підключитися
- Потребувати циклу живлення для деяких змін
Доступ до консолі
Ви також можете переглядати/змінювати налаштування через консоль G-code:
Переглянути всі налаштування:
$$
Переглянути одне налаштування:
$100
Змінити налаштування:
$100=80.0
Відновити значення за замовчуванням:
$RST=$
:::небезпека Відновлення значень за замовчуванням видаляє всі налаштування
Команда $RST=$ скидає всі налаштування GRBL до заводських значень за замовчуванням. Ви втратите буд��ь-яке калібрування та налаштування. Спочатку зробіть резервну копію налаштувань!
:::
Критичні налаштування для лазерів
Ці налаштування найважливіші для роботи лазера:
$32 - Режим лазера
Значення: 0 = Вимкнено, 1 = Увімкнено
Призначення: Увімкнення специфічних для лазера функцій у GRBL
Коли увімкнено (1):
- Лазер автоматично вимикається під час переміщень G0 (швидких)
- Потужність динамічно регулюється під час прискорення/сповільнення
- Запобігає випадковим опікам під час позиціонування
Коли вимкнено (0):
- Лазер поводиться як шпиндель (режим CNC)
- Не вимикається під час швидких переміщень
- Небезпечно для використання лазера!
:::увага Завжди вмикайте режим лазера $32 має завжди бути встановлено на 1 для лазерних різаків. Вимкнений режим лазера може спричинити ненавмисні опіки та пожежонебезпеку. :::
$30 та $31 - Діапазон потужності лазера
$30 - Максимальна потужність лазера (RPM) $31 - Мінімальна потужність лазера (RPM)
Призначення: Визначає діапазон потужності для команд S
Типові значення:
- $30=1000, $31=0 (діапазон S0-S1000, найпоширеніший)
- $30=255, $31=0 (діапазон S0-S255, деякі контролери)
:::порада Відповідність конфігурації Rayforge Налаштування "Максимальна потужність" у ваших Налаштуваннях лазера має відповідати вашому значенню $30. Якщо $30=1000, встановіть максимальну потужність на 1000 в Rayforge. :::
$130 та $131 - Максимальний хід
$130 - Максимальний хід X (мм) $131 - Максимальний хід Y (мм)
Призначення: Визначає робочу область вашої машини
Чому це важливо:
- Програмні обмеження ($20) використовують ці значення для запобігання зіткненням
- Визначає межі системи координат
- Має відповідати фізичному розміру вашої машини
Довідник налаштувань
Конфігурація степерів ($0-$6)
Контролює електричні сигнали та таймінги степерних двигунів.
| Налаштування | Опис | Типове значення |
|---|---|---|
| $0 | Час імпульсу кроку (мкс) | 10 |
| $1 | Затримка холостого ходу кроку (мс) | 25 |
| $2 | Інверсія імпульсу к�року (маска) | 0 |
| $3 | Інверсія напрямку кроку (маска) | 0 |
| $4 | Інвертувати пін увімкнення кроку | 0 |
| $5 | Інвертувати піни обмежень | 0 |
| $6 | Інвертувати пін зонда | 0 |
Обмеження та Homing ($20-$27)
Контролює кінцеві вимикачі та поведінку homing.
| Налаштування | Опис | Типове значення |
|---|---|---|
| $20 | Увімкнути програмні обмеження | 0 або 1 |
| $21 | Увімкнути апаратні обмеження | 0 |
| $22 | Увімкнути цикл homing | 0 або 1 |
| $23 | Інверсія напрямку homing | 0 |
| $24 | Швидкість пошуку homing (мм/хв) | 25 |
| $25 | Швидкість пошуку homing (мм/хв) | 500 |
| $26 | Затримка debounce homing (мс) | 250 |
| $27 | Відстань відведення homing (мм) | 1.0 |
Шпиндель та лазер ($30-$32)
| Налаштування | Опис | Значення для лазера |
|---|---|---|
| $30 | Максимальна швидкість шпинделя | 1000.0 |
| $31 | Мінімальна швидкість шпинделя | 0.0 |
| $32 | Увімкнути режим лазера | 1 |
Калібрування осей ($100-$102)
Визначає, скільки кроків степерного двигуна дорівнює одному міліметру переміщення.
| Налаштування | Опис | Примітки |
|---|---|---|
| $100 | Кроків/мм X | Залежить від співвідношення шків/ремінь |
| $101 | Кроків/мм Y | Зазвичай таке ж як X |
| $102 | Кроків/мм Z | Не використовується на більшості лазерів |
Розрахунок кроків/мм:
кроків/мм = (кроків_двигуна_на_оберт × мікрокрокування) / (зубців_шківа × крок_ременя)
Приклад: 200 кроків/оберт, 16 мікрокроків, шків 20 зубців, ремінь GT2:
кроків/мм = (200 × 16) / (20 × 2) = 3200 / 40 = 80
Швидкість та прискорення осей ($110-$122)
| Налаштування | Опис | Типове значення |
|---|---|---|
| $110 | Макс. швидкість X (мм/хв) | 5000.0 |
| $111 | Макс. швидкість Y (мм/хв) | 5000.0 |
| $112 | Макс. швидкість Z (мм/хв) | 500.0 |
| $120 | Прискорення X (мм/сек²) | 500.0 |
| $121 | Прискорення Y (мм/сек²) | 500.0 |
| $122 | Прискорення Z (мм/сек²) | 100.0 |
Хід осей ($130-$132)
| Налаштування | Опис | Примітки |
|---|---|---|
| $130 | Макс. хід X (мм) | Ширина робочої області |
| $131 | Макс. хід Y (мм) | Глибина робочої області |
| $132 | Макс. хід Z (мм) | Хід Z (якщо застосовно) |
Приклад типової конфігурації
Типовий діодний лазер (300×400мм)
$0=10 ; Імпульс кроку 10мкс
$1=255 ; Затримка холостого ходу кроку 255мс
$2=0 ; Без інверсії кроку
$3=0 ; Без інверсії напрямку
$4=0 ; Без інверсії увімкнення
$5=0 ; Без інверсії обмежень
$10=1 ; Звіт WPos
$11=0.010 ; Відхилення сполучення 0.01мм
$12=0.002 ; Толерантність дуги 0.002мм
$13=0 ; Звіт у мм
$20=1 ; Програмні обмеження увімкнено
$21=0 ; Апаратні обмеження вимкнено
$22=1 ; Homing увімкнено
$23=0 ; Home до мінімуму
$24=50.0 ; Подача homing 50мм/хв
$25=1000.0 ; Пошук homing 1000мм/хв
$26=250 ; Debounce homing 250мс
$27=2.0 ; Відведення homing 2мм
$30=1000.0 ; Макс. потужність S1000
$31=0.0 ; Мін. потужність S0
$32=1 ; Режим лазера УВІМКНЕНО
$100=80.0 ; Кроків/мм X
$101=80.0 ; Кроків/мм Y
$102=80.0 ; Кроків/мм Z
$110=5000.0 ; Макс. швидкість X
$111=5000.0 ; Макс. швидкість Y
$112=500.0 ; Макс. швидкість Z
$120=500.0 ; Прискорення X
$121=500.0 ; Прискорення Y
$122=100.0 ; Прискорення Z
$130=400.0 ; Макс. хід X
$131=300.0 ; Макс. хід Y
$132=0.0 ; Макс. хід Z
Резервне копіювання налаштувань
Процедура резервного копіювання
-
Через Rayforge:
- Відкрийте панель налаштувань пристрою
- Натисніть "Експортувати налаштування"
- Збережіть файл як
grml-backup-YYYY-MM-DD.txt
-
Через консоль:
- Надішліть команду
$$ - Скопіюйте весь вивід у текстовий файл
- Збережіть з датою
- Надішліть команду
Процедура відновлення
- Відкрийте файл резервної копії
- Надішліть кожен рядок (
$100=80.0тощо) через консоль - Перевірте командою
$$
:::порада Регулярні резервні копії Робіть резервні копії налаштувань після будь-якого калібрування або налаштування. Зберігайте резервні копії в безпечному місці. :::
Дивіться також
- Загальні налаштування - Назва машини та налаштування швидкості
- Налаштування лазера - Конфігурація лазерної головки
- Виправлення проблем підключення - Виправлення проблем з підключенням