Intégration Caméra
Rayforge supporte l'intégration de caméra USB pour l'alignement et le positionnement précis des matériaux. La fonctionnalité de superposition caméra te permet de voir exactement où ton laser va couper ou graver sur le matériau, éliminant les suppositions et réduisant le gaspillage de matériau.
Flux de travail de configuration
La configuration d'une caméra suit quatre étapes :
- Ajouter une caméra — Connecte ta caméra et ajoute-la à la configuration de la machine
- Ajuster les paramètres d'image — Règle la luminosité, le contraste, la balance des blancs et la réduction de bruit
- Calibrer l'objectif — Corrige la distorsion avec l'assistant de calibration ou des coefficients manuels
- Aligner la caméra — Mappe les pixels de la caméra aux coordonnées machine pour un positionnement précis
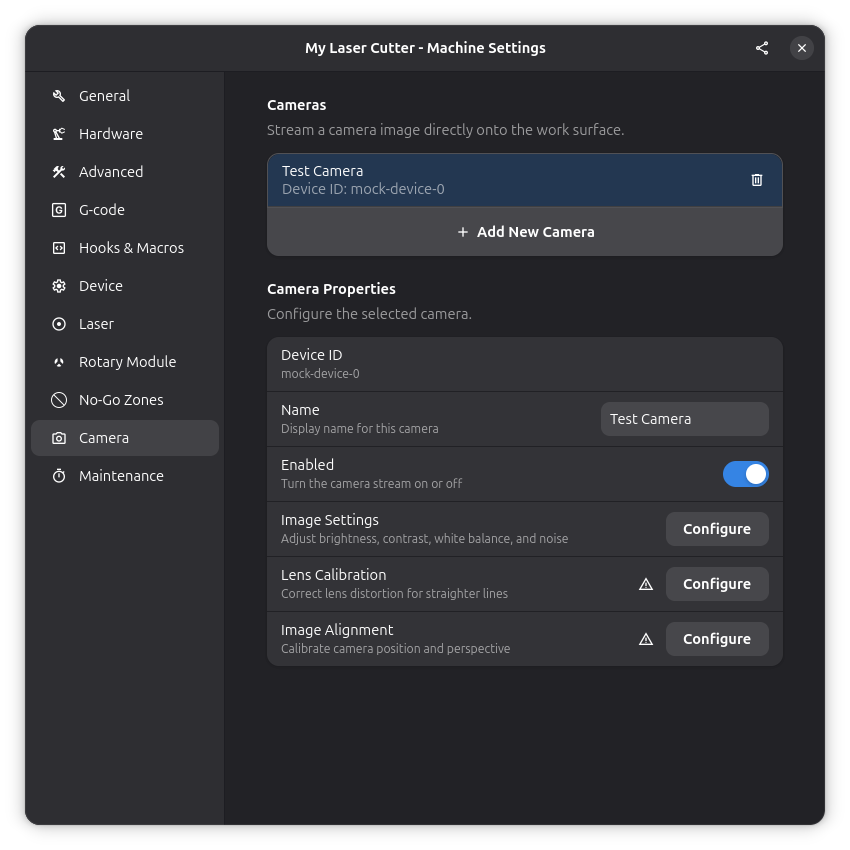
Les étapes 2 à 4 sont accessibles depuis le panneau des propriétés de la caméra, où des icônes d'état montrent l'avancement en un coup d'œil :
- ✓ Calibration d'objectif — La calibration a été effectuée
- ⚠ Alignement d'image — Avertissement lorsque l'alignement doit être refait (p. ex., après la calibration d'objectif)
- ✓ Alignement d'image — L'alignement est à jour et valide
Étape 1 : Ajouter une caméra
Prérequis Matériels
Caméras compatibles :
- Webcams USB (les plus courantes)
- Caméras intégrées d'ordinateur portable (si tu exécutes Rayforge sur un ordinateur portable près de la machine)
- Toute caméra supportée par Video4Linux2 (V4L2) sur Linux ou DirectShow sur Windows
Configuration recommandée :
- Caméra montée au-dessus de la zone de travail avec une vue claire du matériau
- Conditions d'éclairage constantes
- Caméra positionnée pour capturer la zone de travail laser
- Montage sécurisé pour éviter le mouvement de la caméra
Ajouter une Caméra
-
Connecte ta caméra à ton ordinateur via USB
-
Ouvre les Paramètres Caméra :
- Navigue vers Paramètres → Préférences → Caméra
- Ou utilise le bouton de la barre d'outils caméra
-
Ajoute une nouvelle caméra :
- Clique sur le bouton "+" pour ajouter une caméra
- Entre un nom descriptif (ex : "Caméra Supérieure", "Caméra Zone de Travail")
- Sélectionne l'appareil dans le menu déroulant
- Sur Linux :
/dev/video0,/dev/video1, etc. - Sur Windows : Caméra 0, Caméra 1, etc.
- Sur Linux :
-
Active la caméra :
- Bascule l'interrupteur d'activation de la caméra
- Le flux en direct devrait apparaître sur ton canevas
Étape 2 : Ajuster les paramètres d'image
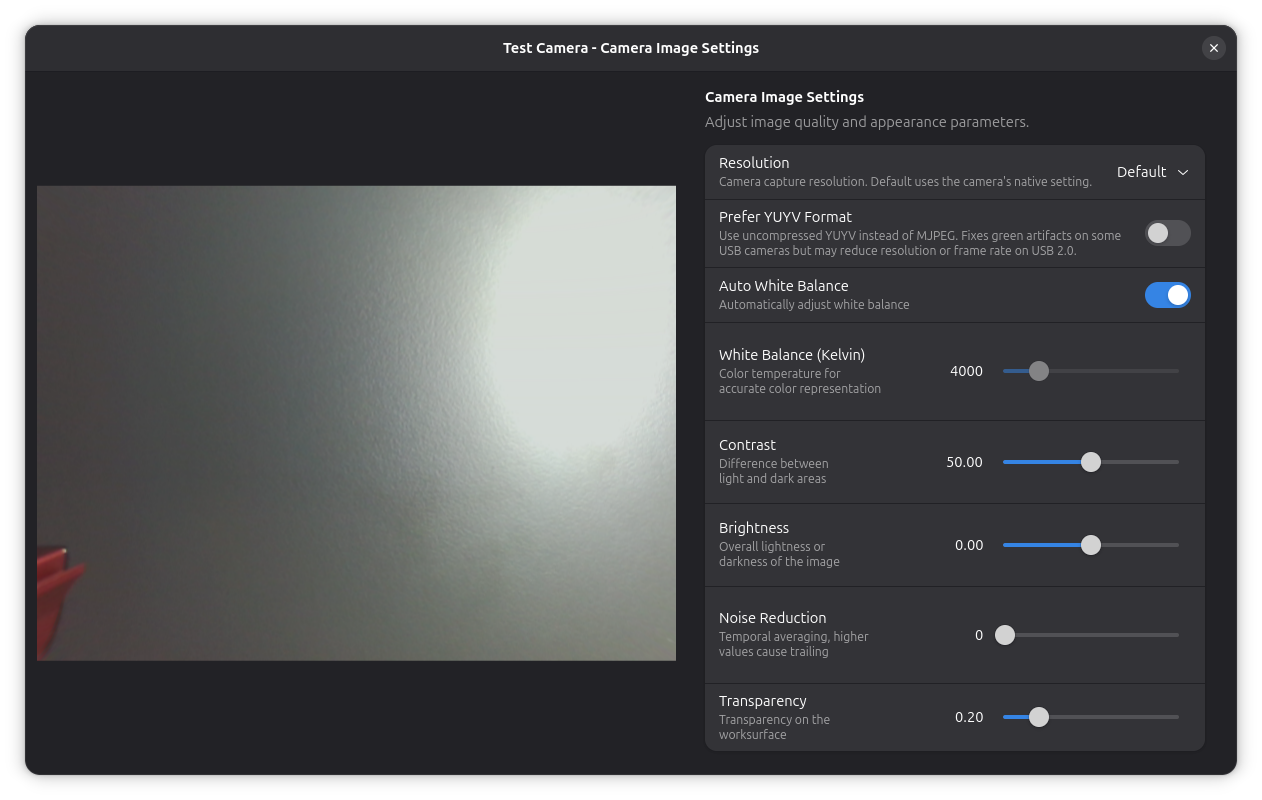
Clique sur Configurer à côté de Paramètres d'image dans les propriétés de la caméra pour ouvrir la boîte de dialogue des paramètres d'image. Ajuste ces paramètres pour obtenir une vue caméra claire :
| Paramètre | Description |
|---|---|
| Luminosité | Luminosité globale de l'image (-100 à +100) |
| Contraste | Définition des bords et contraste (0 à 100) |
| Préférer YUYV | Utilise le YUYV non compressé au lieu de MJPEG. Plus lent mais peut corriger certains problèmes |
| Transparence | Opacité de la superposition sur le canevas (0% opaque à 100% transparent) |
| Balance des Blancs | Correction de la température de couleur (Auto ou 2500-10000K) |
| Réduction de Bruit | Réduction de bruit temporelle (0.0 à 0.95) |
L'option YUYV est utile si ta caméra produit des images teintées de vert avec le format MJPEG par défaut. Note que le YUYV est non compressé et peut réduire la résolution disponible ou le taux d'images sur les connexions USB 2.0.
Étape 3 : Calibration d'objectif
Si ta caméra a un objectif grand angle ou est montée en angle, l'image peut montrer une courbure visible — les lignes droites apparaissent courbées, surtout près des bords de l'image. C'est ce qu'on appelle la distorsion d'objectif, et elle peut fausser l'alignement même si tes points d'alignement sont mesurés avec soin.
Rayforge inclut un assistant de calibration guidé qui corrige cette distorsion automatiquement. Tu peux aussi ajuster les coefficients de distorsion manuellement.
Boîte de dialogue Calibration d'objectif
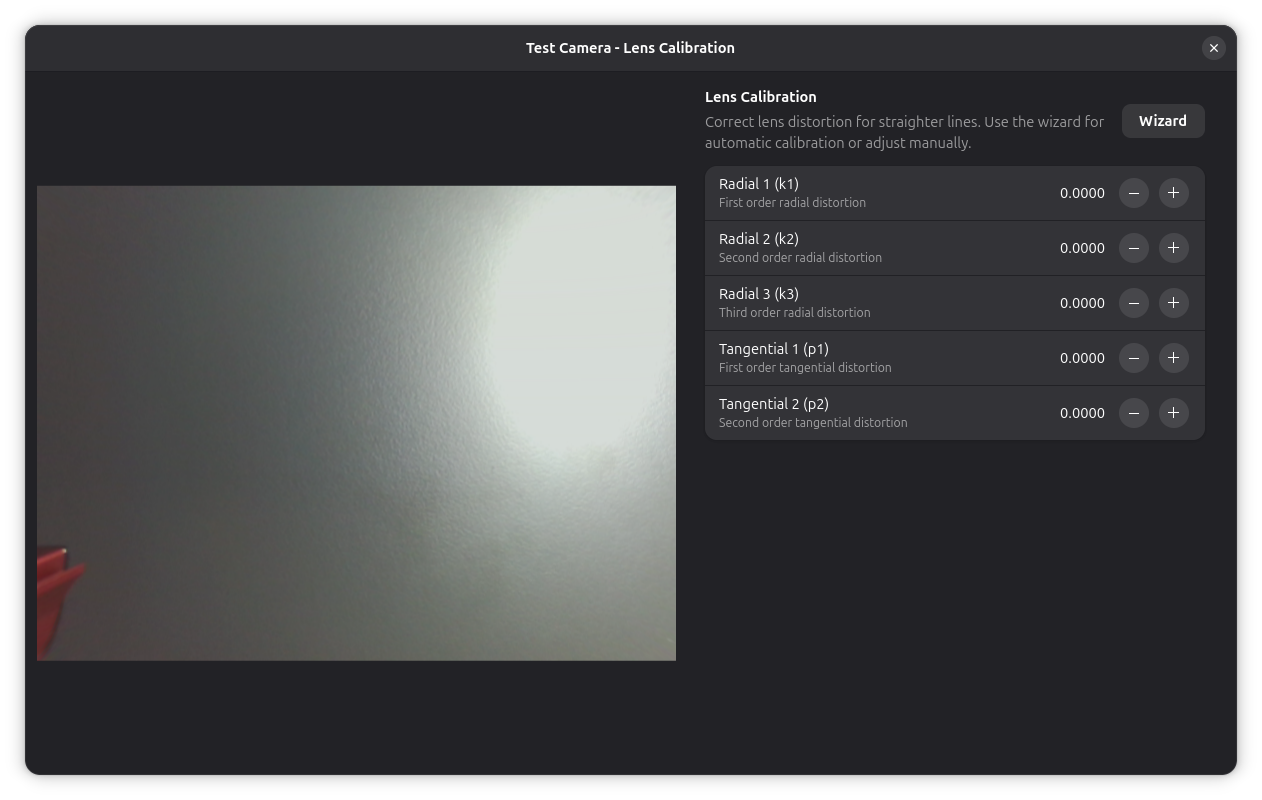
Ouvre la boîte de dialogue de calibration d'objectif en cliquant sur Configurer à côté de Calibration d'objectif dans les propriétés de la caméra. À partir de là, tu peux :
- Ajuster les coefficients de distorsion manuellement — Ajuste finement les paramètres de distorsion radiale (k1–k3) et tangentielle (p1–p2)
- Lancer l'assistant de calibration — Clique sur le bouton Assistant pour une calibration automatique guidée
Les ajustements manuels sont utiles pour le réglage fin après que l'assistant a calculé une solution initiale, ou lorsque tu connais les valeurs de distorsion approximatives de ton objectif.
Assistant de Calibration
L'assistant de calibration te guide pour capturer plusieurs images d'une carte de calibration imprimée depuis différentes positions sur le lit. Il calcule ensuite un modèle de distorsion automatiquement.
Étape 1 : Configurer la carte de calibration
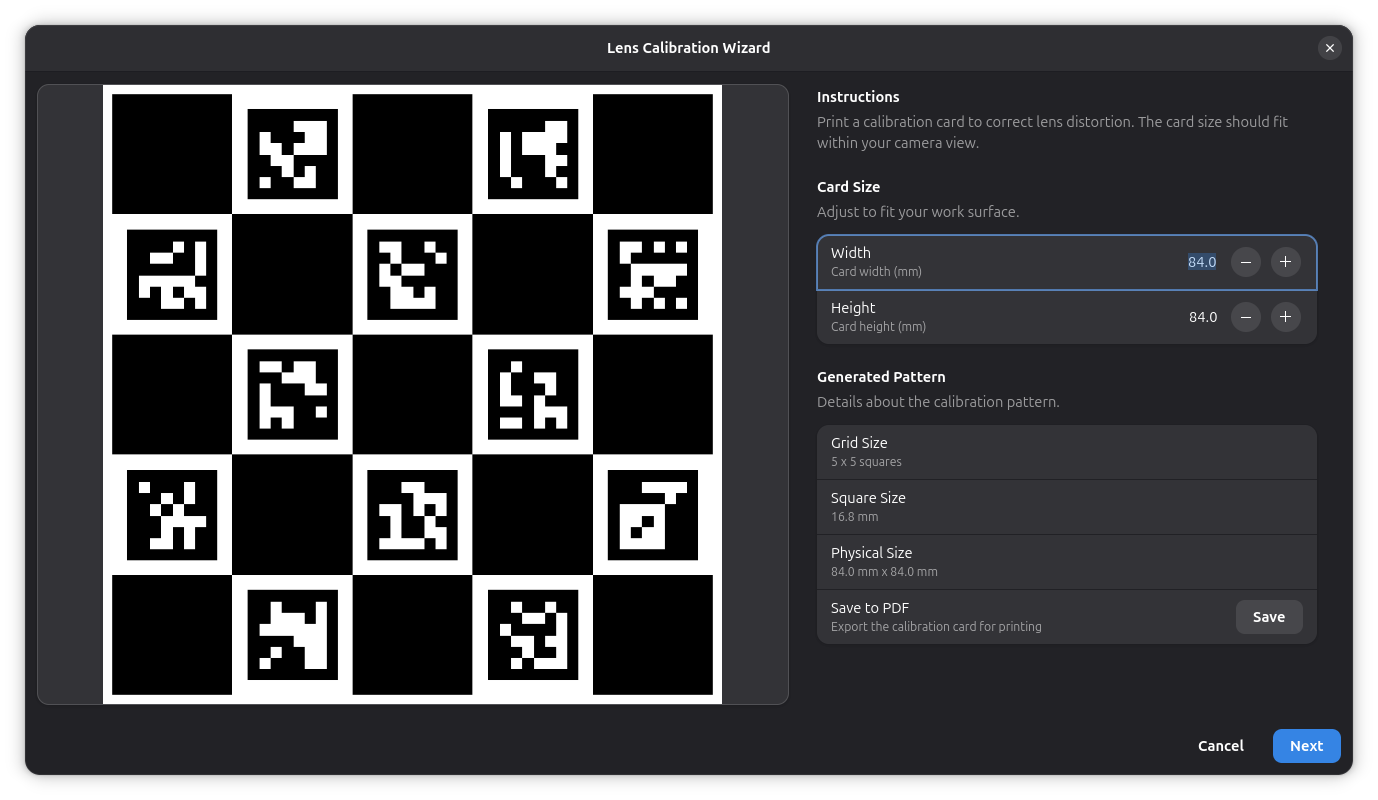
- Clique sur Assistant dans la boîte de dialogue de calibration d'objectif pour commencer
- Définis la Largeur et la Hauteur de ta carte imprimée
- L'aperçu se met à jour en temps réel — la carte doit couvrir environ 70% de la vue caméra
- Clique sur Enregistrer en PDF pour exporter la carte à imprimer
- Imprime la carte et place-la sur le lit laser
Étape 2 : Capturer des images
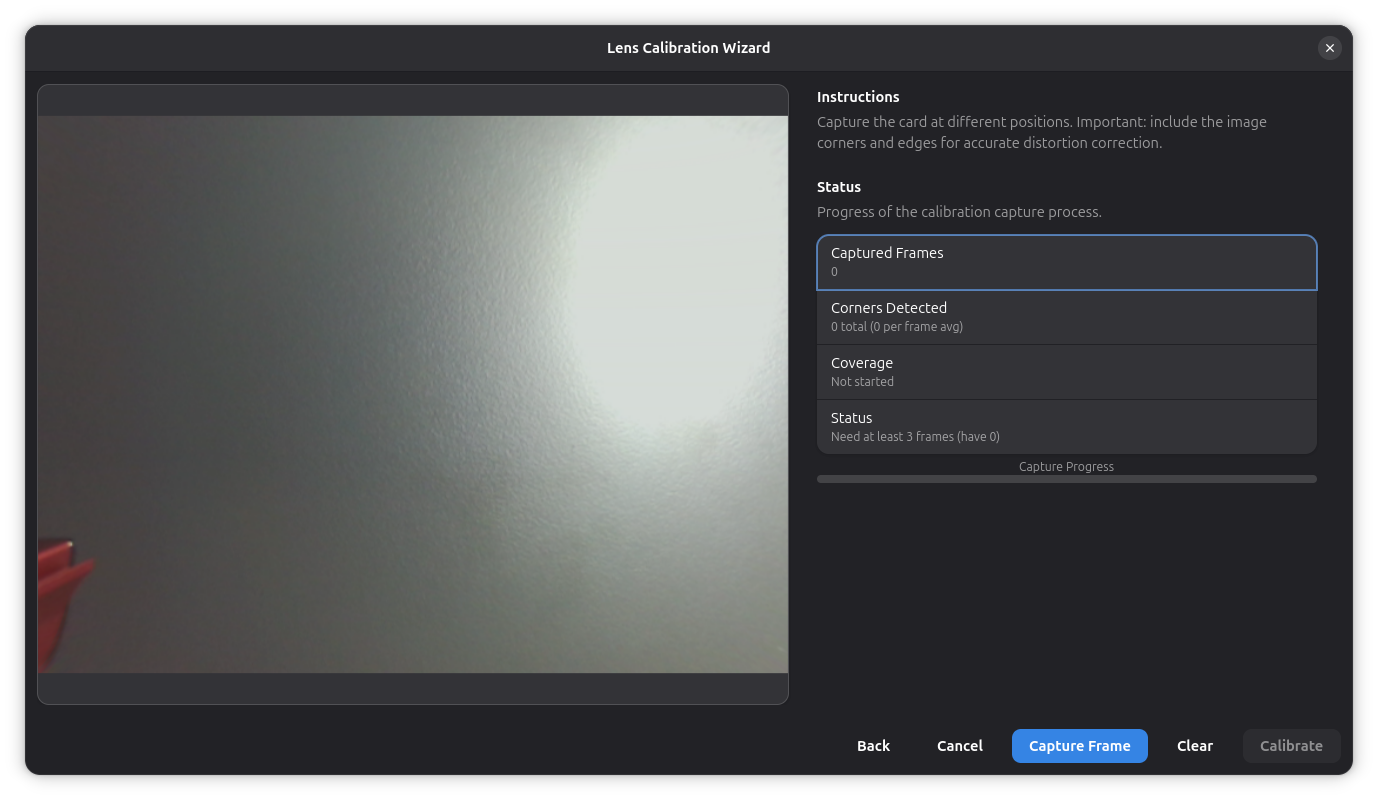
- Clique sur Suivant pour entrer en mode capture
- Positionne la carte de calibration à différents endroits et angles dans la vue caméra
- Clique sur Capturer l'image pour chaque position
- Vise au moins 8 captures couvrant tout le cadre, y compris les coins et les bords
- La barre de progression et les indicateurs d'état montrent la qualité de la capture
Étape 3 : Appliquer la calibration
- Une fois suffisamment d'images capturées, clique sur Calibrer
- Les coefficients de distorsion calculés sont automatiquement appliqués à la caméra
- La superposition caméra affiche maintenant une image corrigée et droite
Étape 4 : Alignement d'image
L'alignement de la caméra calibre la relation entre les pixels de la caméra et les coordonnées du monde réel, permettant un positionnement précis.
Pourquoi l'Alignement est Nécessaire
La caméra voit la zone de travail d'en haut, mais l'image peut être :
- Tournée par rapport aux axes de la machine
- Mise à l'échelle différemment dans les directions X et Y
- Déformée par la perspective de l'objectif
L'alignement crée une matrice de transformation qui mappe les pixels de la caméra aux coordonnées machine.
Procédure d'Alignement
-
Ouvre la Boîte de Dialogue d'Alignement :
- Clique sur le bouton Configurer à côté de Alignement d'image dans les propriétés de la caméra
- La boîte de dialogue affiche le flux caméra avec la superposition d'alignement actuelle
-
Place des marqueurs d'alignement :
- Tu as besoin d'au moins 3 points de référence (4 recommandés pour une meilleure précision)
- Les points d'alignement doivent être répartis sur la zone de travail
- Utilise des positions connues comme :
- Position d'origine de la machine
- Marques de règle
- Trous d'alignement pré-découpés
- Grille de calibration
-
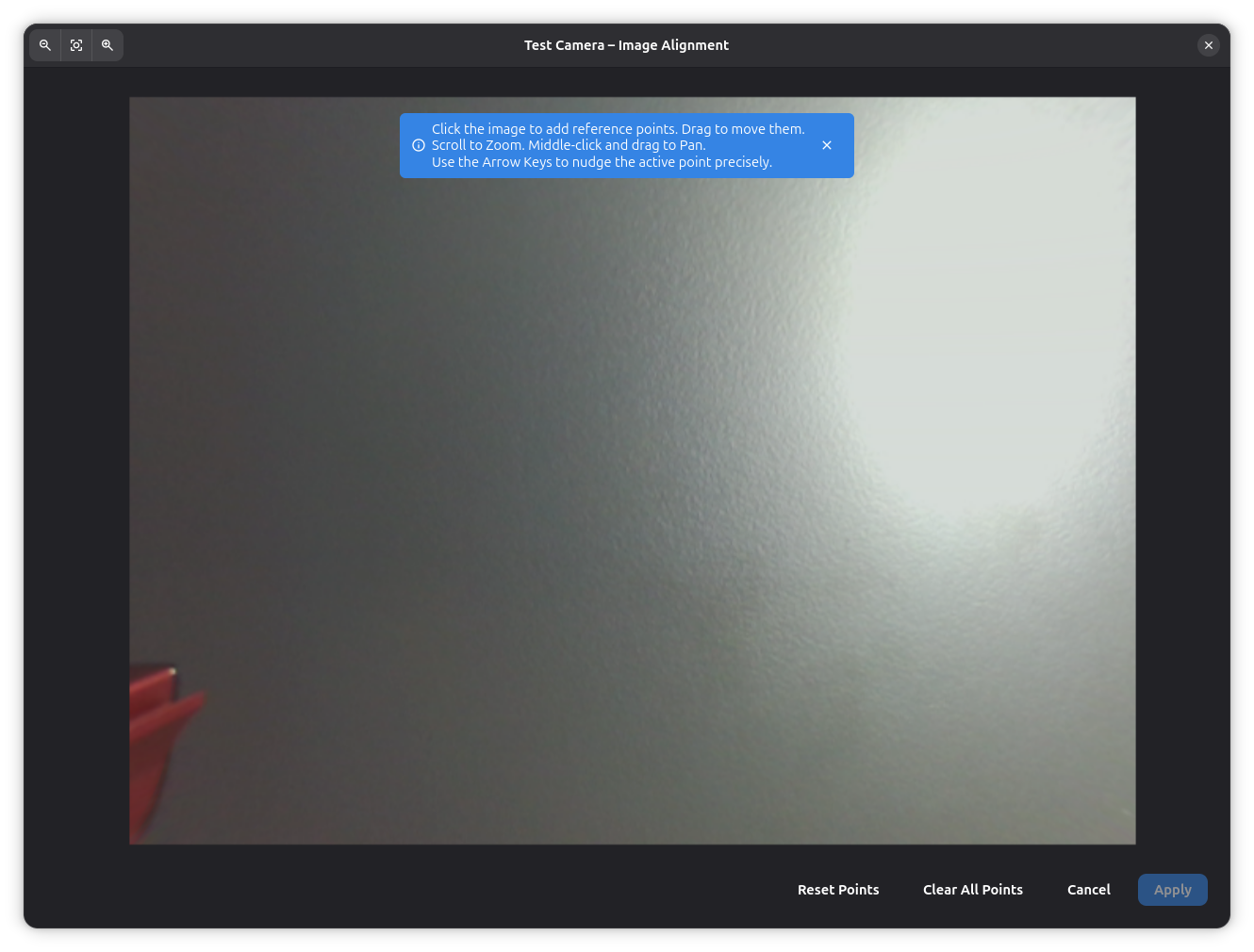
Marque les points d'image :
- Clique sur l'image de la caméra pour placer un point à un emplacement connu
- Le widget bulle apparaît montrant les coordonnées du point
- Répète pour chaque point de référence
-
Entre les coordonnées monde :
- Pour chaque point d'image, entre les coordonnées X/Y réelles en mm
- Ce sont les coordonnées machine réelles où chaque point est situé
- Mesure avec précision avec une règle ou utilise des positions machine connues
-
Applique l'alignement :
- Clique sur Appliquer pour calculer la transformation
- La superposition caméra sera maintenant correctement alignée
-
Vérifie l'alignement :
- Déplace la tête laser à une position connue
- Vérifie que le point laser s'aligne avec la position attendue dans la vue caméra
- Ajuste finement en ré-alignant si nécessaire
Statut d'Alignement
Le panneau des propriétés de la caméra affiche le statut d'alignement avec une icône :
- Coche — L'alignement est à jour et valide
- Avertissement — L'alignement doit être refait. Cela se produit lorsque la calibration d'objectif est mise à jour, car la correction de distorsion modifie l'image de la caméra et invalide l'alignement existant. Tes points d'alignement sont conservés — il suffit d'ouvrir la boîte de dialogue et de cliquer à nouveau sur Appliquer.
Exemple de flux de travail
- Déplace le laser à la position d'origine (0, 0) et marque dans la caméra
- Déplace le laser à (100, 0) et marque dans la caméra
- Déplace le laser à (100, 100) et marque dans la caméra
- Déplace le laser à (0, 100) et marque dans la caméra
- Entre les coordonnées exactes pour chaque point
- Applique et vérifie
- Utilise des points aux coins de ta zone de travail pour une couverture maximale
- Évite de regrouper les points dans une zone
- Mesure les coordonnées monde avec soin - la précision ici détermine la qualité globale de l'alignement
- Ré-aligne si tu déplaces la caméra ou changes la distance de mise au point
- Ré-aligne après la mise à jour de la calibration d'objectif
- Sauvegarde ton alignement - il persiste entre les sessions
Utiliser la Superposition Caméra
Une fois alignée, la superposition caméra aide à positionner les travaux avec précision. Active-la en cliquant sur l'icône caméra dans la barre d'outils de la fenêtre principale.
Caméras Multiples
Rayforge supporte plusieurs caméras pour différentes vues ou machines :
- Ajoute plusieurs caméras dans les préférences
- Chaque caméra peut avoir un alignement indépendant
- Bascule entre les caméras en utilisant le sélecteur de caméra
- Cas d'utilisation :
- Vue de dessus + vue latérale pour objets 3D
- Différentes caméras pour différentes machines
- Grand angle + caméra de détail
Dépannage
Caméra Non Détectée
Problème : La caméra n'apparaît pas dans la liste des appareils.
Solutions :
Linux : Vérifie si la caméra est reconnue par le système :
# Lister les appareils vidéo
ls -l /dev/video*
# Vérifier la caméra avec v4l2
v4l2-ctl --list-devices
# Tester avec une autre application
cheese # ou VLC, etc.
Pour les utilisateurs Snap :
# Accorder l'accès caméra
sudo snap connect rayforge:camera
Windows :
- Vérifie le Gestionnaire de Périphériques pour la caméra sous "Caméras" ou "Appareils d'imagerie"
- Assure-toi qu'aucune autre application n'utilise la caméra (ferme Zoom, Skype, etc.)
- Essaye un port USB différent
- Mets à jour les pilotes de la caméra
La Caméra Affiche un Écran Noir
Problème : Caméra détectée mais n'affiche pas d'image.
Causes possibles :
- Caméra utilisée par une autre application - Ferme les autres applications vidéo
- Mauvais appareil sélectionné - Essaye différents IDs d'appareil
- Permissions caméra - Sur Linux Snap, assure-toi que l'interface caméra est connectée
- Problème matériel - Teste la caméra avec une autre application
Solutions :
# Linux : Libérer l'appareil caméra
sudo killall cheese # ou autres applications caméra
# Vérifier quel processus utilise la caméra
sudo lsof /dev/video0
Alignement Non Précis
Problème : La superposition caméra ne correspond pas à la position réelle du laser.
Diagnostic :
- Points d'alignement insuffisants - Utilise au moins 4 points
- Erreurs de mesure - Vérifie les coordonnées monde
- Caméra déplacée - Ré-aligne si la position de la caméra a changé
- Distorsion non-linéaire - Peut nécessiter une calibration d'objectif
Améliorer la précision :
- Utilise plus de points d'alignement (6-8 pour de très grandes zones)
- Répartis les points sur toute la zone de travail
- Mesure les coordonnées monde très soigneusement
- Utilise les commandes de mouvement machine pour positionner précisément le laser aux coordonnées connues
- Ré-aligne après tout ajustement de la caméra
Mauvaise Qualité d'Image
Problème : L'image caméra est floue, sombre ou délavée.
Solutions :
- Ajuste la luminosité/contraste dans les paramètres caméra
- Améliore l'éclairage - Ajoute un éclairage de zone de travail constant
- Nettoie l'objectif de la caméra - La poussière et les débris réduisent la clarté
- Vérifie la mise au point - L'autofocus peut ne pas bien fonctionner ; utilise le manuel si possible
- Réduis temporairement la transparence pour voir l'image caméra plus clairement
- Essaye différents paramètres de balance des blancs
- Ajuste la réduction de bruit si l'image apparaît granuleuse
Lag ou Saccades de la Caméra
Problème : Le flux caméra en direct est saccadé ou retardé.
Solutions :
- Réduis la résolution caméra dans les paramètres de l'appareil (si accessible)
- Ferme les autres applications utilisant CPU/GPU
- Mets à jour les pilotes graphiques
Pages Connexes
- Vue 3D — Visualiser l'exécution avec superposition caméra
- Cadrer les Travaux — Vérifier la position du travail
- Paramètres Généraux — Configuration de la machine