Integración de Cámara
Rayforge soporta la integración de cámara USB para la alineación y posicionamiento preciso del material. La función de superposición de cámara te permite ver exactamente dónde tu láser va a cortar o grabar en el material, eliminando las conjeturas y reduciendo el desperdicio de material.
Flujo de trabajo de configuración
La configuración de una cámara sigue cuatro pasos:
- Añadir una cámara — Conecta tu cámara y agrégala a la configuración de la máquina
- Ajustar la configuración de imagen — Ajusta brillo, contraste, balance de blancos y reducción de ruido
- Calibrar la lente — Corrige la distorsión con el asistente de calibración o coeficientes manuales
- Alinear la cámara — Mapa los píxeles de la cámara a las coordenadas de la máquina para un posicionamiento preciso
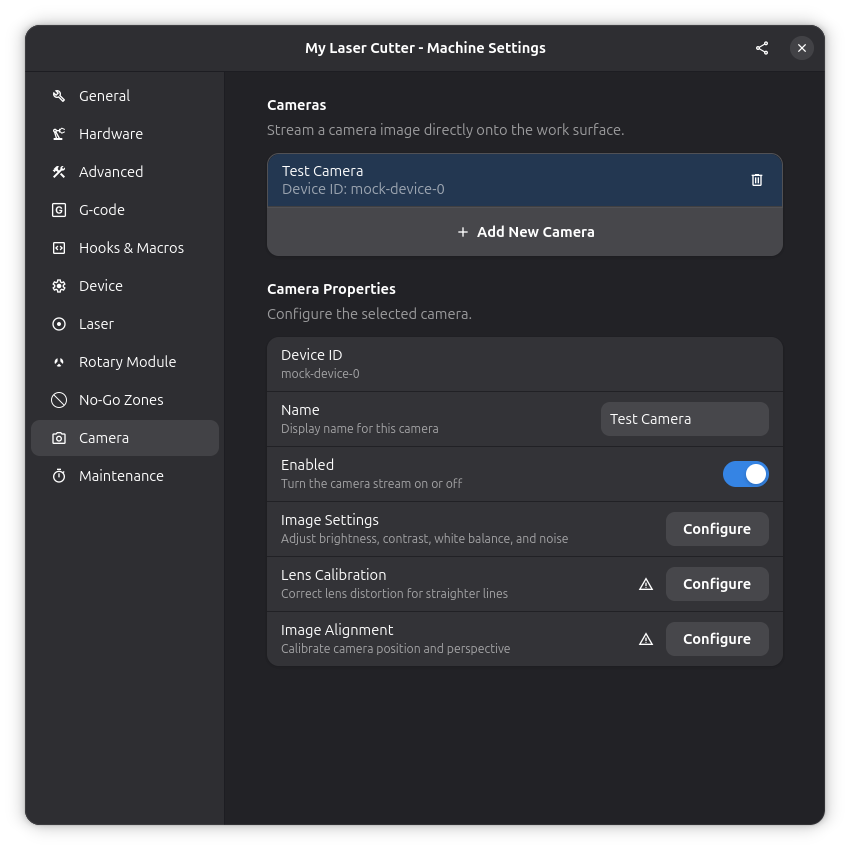
Los pasos 2–4 se acceden desde el panel de propiedades de la cámara, donde los íconos de estado muestran el progreso de un vistazo:
- ✓ Calibración de lente — La calibración se ha realizado
- ⚠ Alineación de imagen — Advertencia cuando la alineación debe rehacerse (p. ej., después de la calibración de lente)
- ✓ Alineación de imagen — La alineación está actualizada y es válida
Paso 1: Añadir una cámara
Requisitos de Hardware
Cámaras compatibles:
- Cámaras web USB (más común)
- Cámaras integradas de laptop (si ejecutas Rayforge en una laptop cerca de la máquina)
- Cualquier cámara soportada por Video4Linux2 (V4L2) en Linux o DirectShow en Windows
Configuración recomendada:
- Cámara montada sobre el área de trabajo con vista clara del material
- Condiciones de iluminación consistentes
- Cámara posicionada para capturar el área de trabajo del láser
- Montaje seguro para prevenir el movimiento de la cámara
Añadir una Cámara
-
Conecta tu cámara a tu computadora vía USB
-
Abre Ajustes de Cámara:
- Navega a Configuración → Preferencias → Cámara
- O usa el botón de la barra de herramientas de cámara
-
Añade una nueva cámara:
- Haz clic en el botón "+" para añadir una cámara
- Ingresa un nombre descriptivo (ej., "Cámara Superior", "Cámara Área de Trabajo")
- Selecciona el dispositivo del menú desplegable
- En Linux:
/dev/video0,/dev/video1, etc. - En Windows: Cámara 0, Cámara 1, etc.
- En Linux:
-
Habilita la cámara:
- Activa el interruptor de habilitación de cámara
- La transmisión en vivo debería aparecer en tu lienzo
Paso 2: Ajustar la configuración de imagen
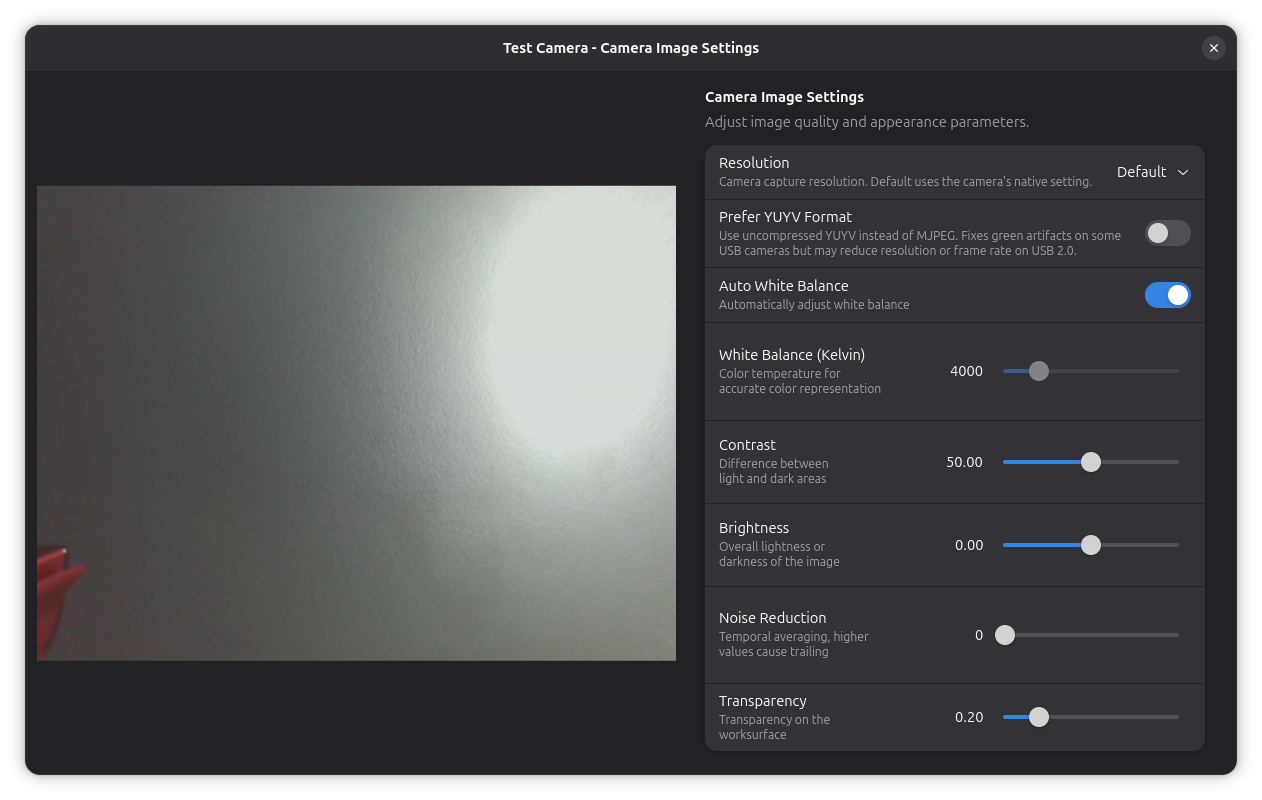
Haz clic en Configurar junto a Ajustes de Imagen en las propiedades de la cámara para abrir el diálogo de configuración de imagen. Ajusta estos parámetros para obtener una vista de cámara clara:
| Ajuste | Descripción |
|---|---|
| Brillo | Brillo general de la imagen (-100 a +100) |
| Contraste | Definición de bordes y contraste (0 a 100) |
| Preferir YUYV | Usar YUYV sin comprimir en lugar de MJPEG. Más lento pero puede solucionar algunos fallos |
| Transparencia | Opacidad de la superposición en el lienzo (0% opaco a 100% transparente) |
| Balance de Blancos | Corrección de temperatura de color (Auto o 2500-10000K) |
| Reducción de Ruido | Reducción de ruido temporal (0.0 a 0.95) |
La opción YUYV es útil si tu cámara produce imágenes con tono verdoso con el formato MJPEG predeterminado. Ten en cuenta que YUYV no está comprimido y puede reducir la resolución disponible o la tasa de fotogramas en conexiones USB 2.0.
Paso 3: Calibración de lente
Si tu cámara tiene una lente gran angular o está montada en ángulo, la imagen puede mostrar curvatura visible — las líneas rectas aparecen dobladas, especialmente cerca de los bordes del encuadre. Esto se llama distorsión de lente, y puede afectar la alineación incluso si tus puntos de alineación están medidos con cuidado.
Rayforge incluye un asistente de calibración guiado que corrige esta distorsión automáticamente. También puedes ajustar los coeficientes de distorsión manualmente.
Diálogo de Calibración de Lente
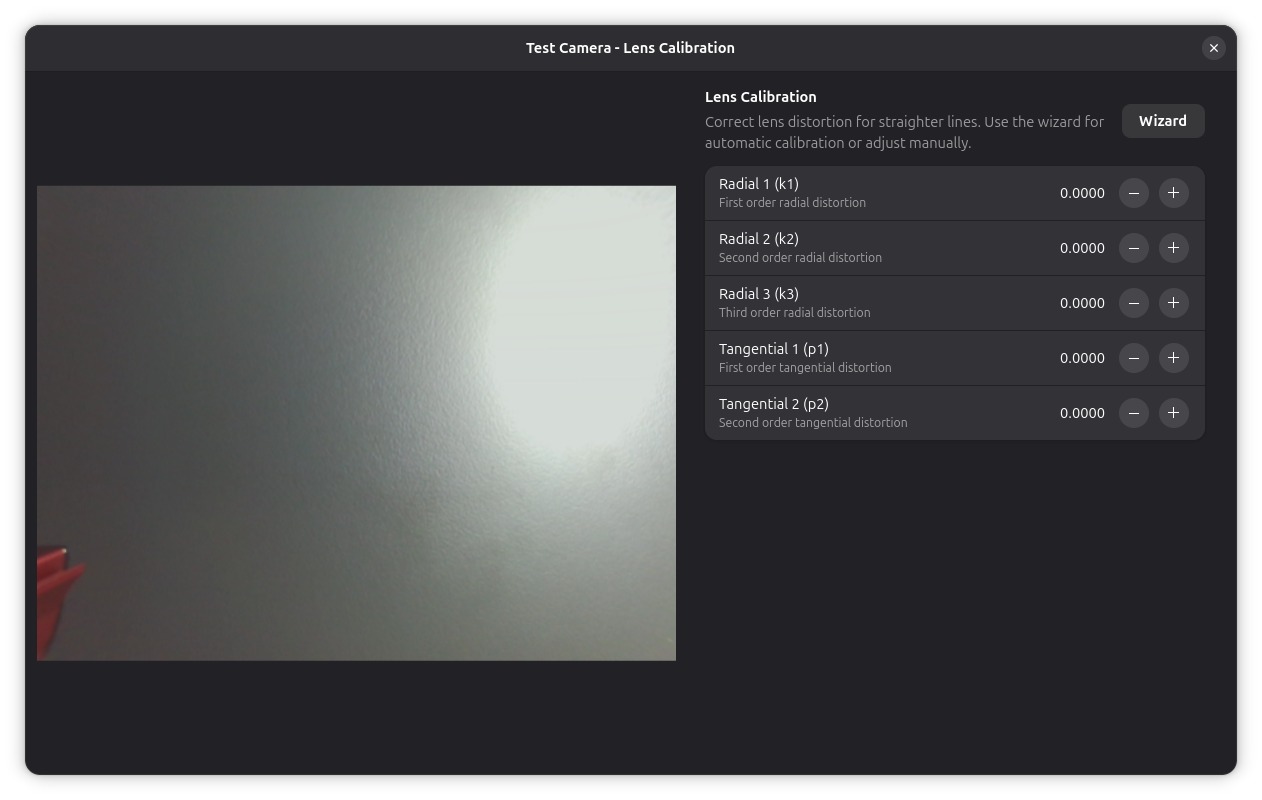
Abre el diálogo de calibración de lente haciendo clic en Configurar junto a Calibración de Lente en las propiedades de la cámara. Desde aquí puedes:
- Ajustar coeficientes de distorsión manualmente — Ajusta finamente los parámetros de distorsión radial (k1–k3) y tangencial (p1–p2)
- Iniciar el asistente de calibración — Haz clic en el botón Asistente para una calibración automática guiada
Los ajustes manuales son útiles para el ajuste fino después de que el asistente haya calculado una solución inicial, o cuando conoces los valores de distorsión aproximados para tu lente.
Asistente de Calibración
El asistente de calibración te guía para capturar varias imágenes de una tarjeta de calibración impresa desde diferentes posiciones en la cama. Luego calcula un modelo de distorsión automáticamente.
Paso 1: Configurar la tarjeta de calibración
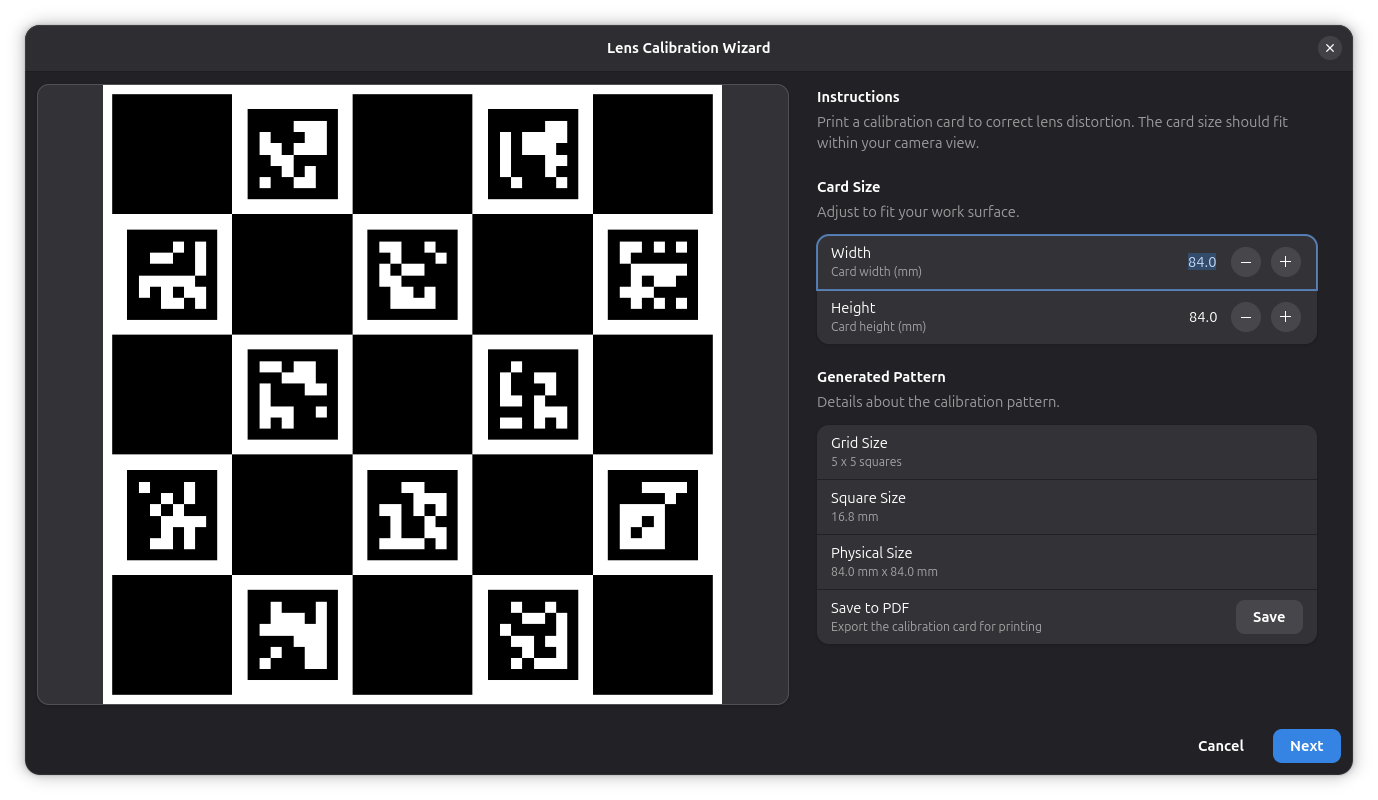
- Haz clic en Asistente en el diálogo de calibración de lente para comenzar
- Establece el Ancho y Alto de tu tarjeta impresa
- La vista previa se actualiza en tiempo real — la tarjeta debe cubrir aproximadamente el 70% de la vista de la cámara
- Haz clic en Guardar como PDF para exportar la tarjeta para imprimir
- Imprime la tarjeta y colócala en la cama láser
Paso 2: Capturar fotogramas
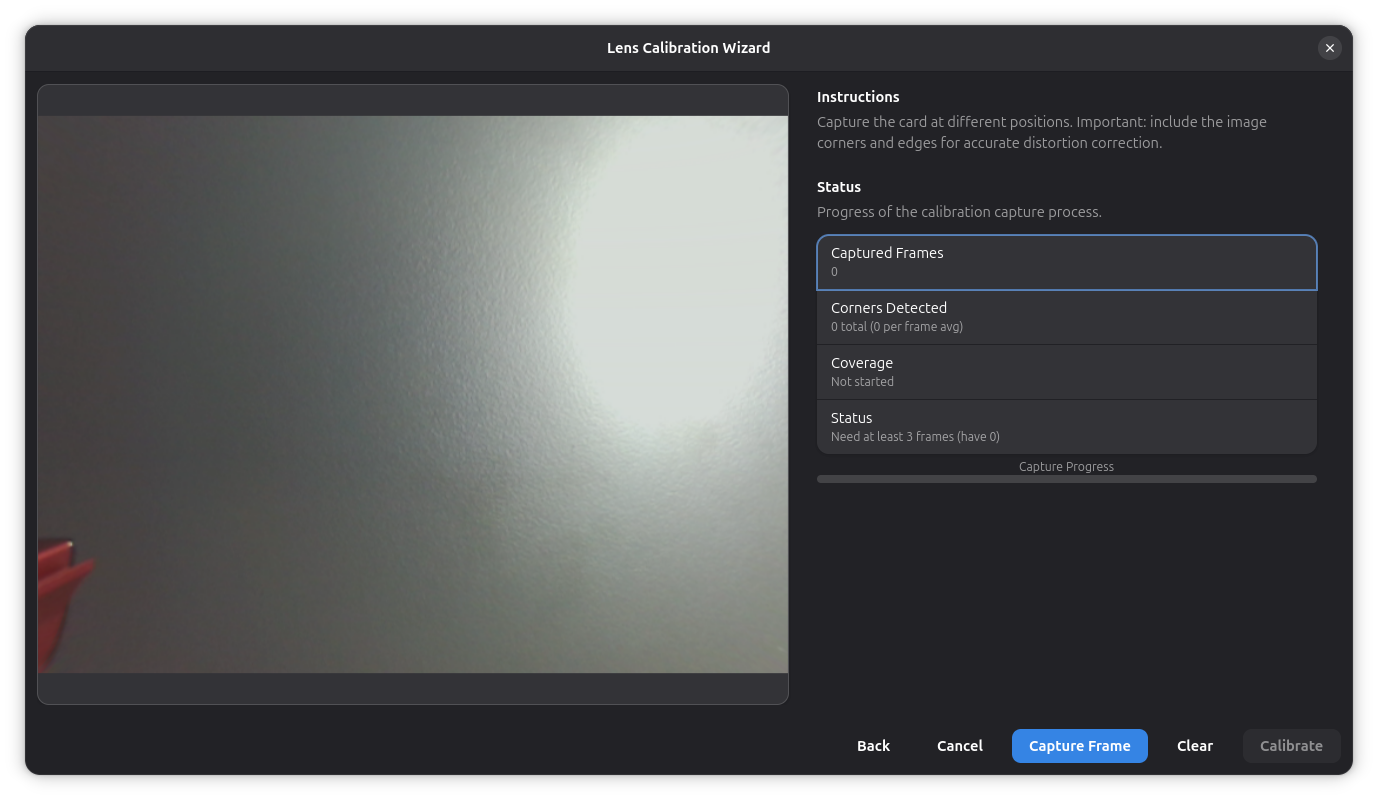
- Haz clic en Siguiente para entrar al modo de captura
- Posiciona la tarjeta de calibración en diferentes ubicaciones y ángulos dentro de la vista de la cámara
- Haz clic en Capturar Fotograma para cada posición
- Apunta a al menos 8 capturas que cubran todo el encuadre, incluyendo esquinas y bordes
- La barra de progreso y los indicadores de estado muestran la calidad de captura
Paso 3: Aplicar calibración
- Una vez que se hayan capturado suficientes fotogramas, haz clic en Calibrar
- Los coeficientes de distorsión calculados se aplican automáticamente a la cámara
- La superposición de la cámara ahora muestra una imagen corregida y recta
Paso 4: Alineación de imagen
La alineación de cámara calibra la relación entre los píxeles de la cámara y las coordenadas del mundo real, permitiendo el posicionamiento preciso.
Por Qué es Necesaria la Alineación
La cámara ve el área de trabajo desde arriba, pero la imagen puede estar:
- Rotada relativa a los ejes de la máquina
- Escalada diferente en direcciones X e Y
- Distorsionada por la perspectiva de la lente
La alineación crea una matriz de transformación que mapea los píxeles de la cámara a las coordenadas de la máquina.
Procedimiento de Alineación
-
Abre el Diálogo de Alineación:
- Haz clic en el botón Configurar junto a Alineación de Imagen en las propiedades de la cámara
- El diálogo muestra la transmisión de la cámara con la superposición de alineación actual
-
Coloca marcadores de alineación:
- Necesitas al menos 3 puntos de referencia (4 recomendados para mejor precisión)
- Los puntos de alineación deben estar distribuidos por el área de trabajo
- Usa posiciones conocidas como:
- Posición de origen de la máquina
- Marcas de regla
- Agujeros de alineación pre-cortados
- Cuadrícula de calibración
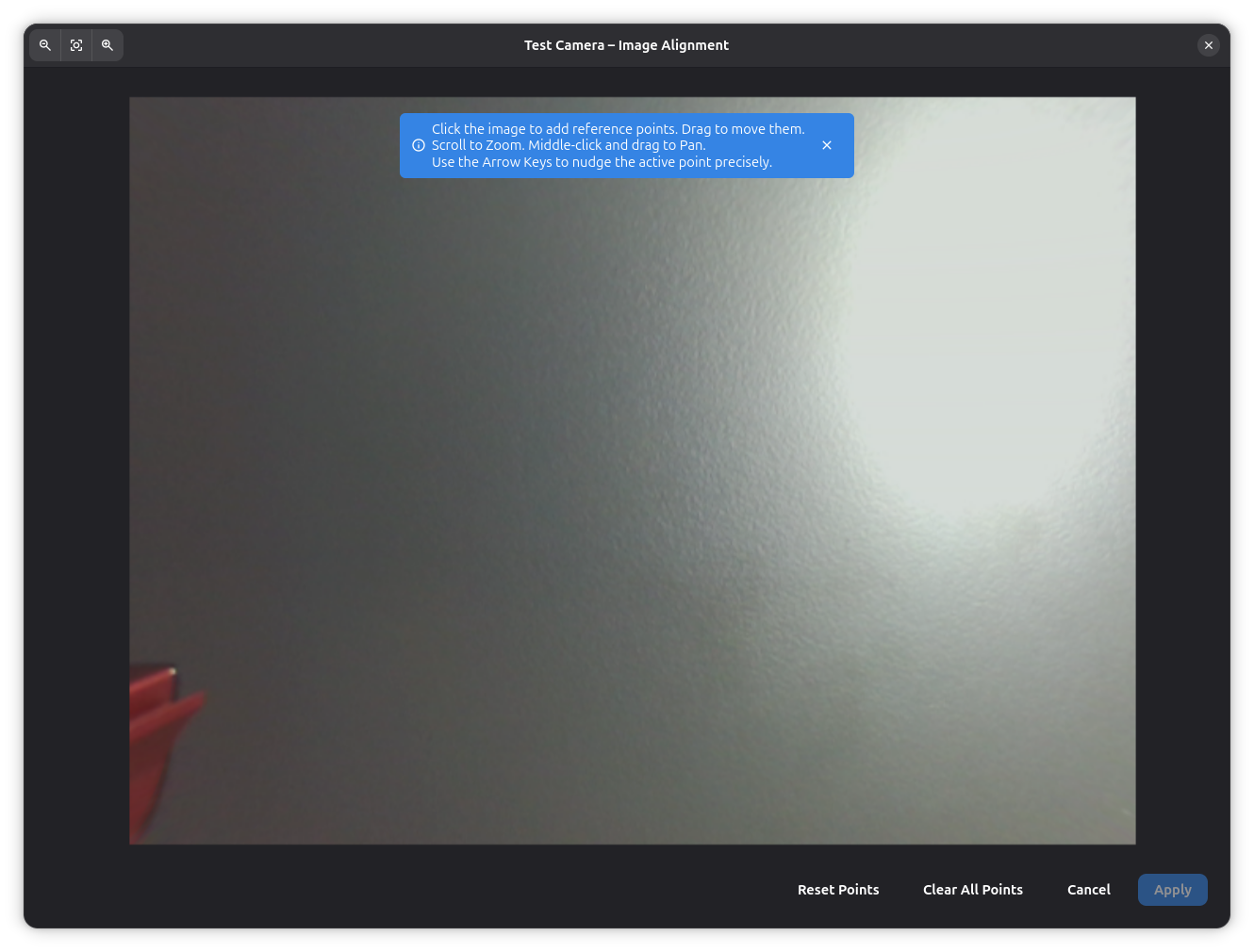
-
Marca puntos de imagen:
- Haz clic en la imagen de la cámara para colocar un punto en una ubicación conocida
- El widget de burbuja aparece mostrando las coordenadas del punto
- Repite para cada punto de referencia
-
Ingresa coordenadas del mundo:
- Para cada punto de imagen, ingresa las coordenadas X/Y del mundo real en mm
- Estas son las coordenadas reales de la máquina donde está ubicado cada punto
- Mide con precisión con una regla o usa posiciones conocidas de la máquina
-
Aplica la alineación:
- Haz clic en Aplicar para calcular la transformación
- La superposición de la cámara ahora estará correctamente alineada
-
Verifica la alineación:
- Mueve la cabeza del láser a una posición conocida
- Verifica que el punto del láser se alinee con la posición esperada en la vista de la cámara
- Ajusta volviendo a alinear si es necesario
Estado de Alineación
El panel de propiedades de la cámara muestra el estado de alineación con un ícono:
- Marca de verificación — La alineación está actualizada y es válida
- Advertencia — La alineación debe rehacerse. Esto ocurre cuando se actualiza la calibración de lente, porque la corrección de distorsión cambia la imagen de la cámara e invalida la alineación existente. Tus puntos de alineación se conservan — simplemente abre el diálogo y haz clic en Aplicar nuevamente.
Flujo de trabajo de ejemplo
- Mueve el láser a la posición de origen (0, 0) y marca en la cámara
- Mueve el láser a (100, 0) y marca en la cámara
- Mueve el láser a (100, 100) y marca en la cámara
- Mueve el láser a (0, 100) y marca en la cámara
- Ingresa las coordenadas exactas para cada punto
- Aplica y verifica
- Usa puntos en las esquinas de tu área de trabajo para máxima cobertura
- Evita agrupar puntos en una área
- Mide las coordenadas del mundo cuidadosamente - la precisión aquí determina la calidad general de la alineación
- Vuelve a alinear si mueves la cámara o cambias la distancia de enfoque
- Vuelve a alinear después de actualizar la calibración de lente
- Guarda tu alineación - persiste entre sesiones
Usando la Superposición de Cámara
Una vez alineada, la superposición de cámara ayuda a posicionar trabajos con precisión. Actívala haciendo clic en el icono de cámara en la barra de herramientas de la ventana principal.
Múltiples Cámaras
Rayforge soporta múltiples cámaras para diferentes vistas o máquinas:
- Añade múltiples cámaras en preferencias
- Cada cámara puede tener alineación independiente
- Cambia entre cámaras usando el selector de cámara
- Casos de uso:
- Vista superior + vista lateral para objetos 3D
- Diferentes cámaras para diferentes máquinas
- Cámara gran angular + cámara de detalle
Solución de Problemas
Cámara No Detectada
Problema: La cámara no aparece en la lista de dispositivos.
Soluciones:
Linux: Verifica si la cámara es reconocida por el sistema:
# Listar dispositivos de video
ls -l /dev/video*
# Verificar cámara con v4l2
v4l2-ctl --list-devices
# Probar con otra aplicación
cheese # o VLC, etc.
Para usuarios de Snap:
# Conceder acceso a la cámara
sudo snap connect rayforge:camera
Windows:
- Revisa el Administrador de Dispositivos para la cámara en "Cámaras" o "Dispositivos de imagen"
- Asegúrate de que ninguna otra aplicación esté usando la cámara (cierra Zoom, Skype, etc.)
- Prueba un puerto USB diferente
- Actualiza los controladores de la cámara
La Cámara Muestra Pantalla Negra
Problema: La cámara es detectada pero no muestra imagen.
Posibles causas:
- Cámara en uso por otra aplicación - Cierra otras aplicaciones de video
- Dispositivo incorrecto seleccionado - Prueba diferentes IDs de dispositivo
- Permisos de cámara - En Linux Snap, asegúrate de que la interfaz de cámara esté conectada
- Problema de hardware - Prueba la cámara con otra aplicación
Soluciones:
# Linux: Liberar dispositivo de cámara
sudo killall cheese # u otras aplicaciones de cámara
# Verificar qué proceso está usando la cámara
sudo lsof /dev/video0
Alineación No Precisa
Problema: La superposición de cámara no coincide con la posición real del láser.
Diagnóstico:
- Puntos de alineación insuficientes - Usa al menos 4 puntos
- Errores de medición - Verifica doblemente las coordenadas del mundo
- Cámara movida - Vuelve a alinear si la posición de la cámara cambió
- Distorsión no lineal - Puede necesitar calibración de lente
Mejora la precisión:
- Usa más puntos de alineación (6-8 para áreas muy grandes)
- Distribuye los puntos por toda el área de trabajo
- Mide las coordenadas del mundo muy cuidadosamente
- Usa comandos de movimiento de la máquina para posicionar precisamente el láser en coordenadas conocidas
- Vuelve a alinear después de cualquier ajuste de la cámara
Calidad de Imagen Pobre
Problema: La imagen de la cámara está borrosa, oscura o deslavada.
Soluciones:
- Ajusta brillo/contraste en ajustes de cámara
- Mejora la iluminación - Añade iluminación consistente del área de trabajo
- Limpia la lente de la cámara - El polvo y escombros reducen la claridad
- Revisa el enfoque - El autoenfoque puede no funcionar bien; usa manual si es posible
- Reduce la transparencia temporalmente para ver la imagen de la cámara más claramente
- Prueba diferentes ajustes de balance de blancos
- Ajusta la reducción de ruido si la imagen aparece granulada
Retraso o Tartamudeo de la Cámara
Problema: La transmisión de cámara en vivo es entrecortada o retrasada.
Soluciones:
- Reduce la resolución de la cámara en ajustes del dispositivo (si es accesible)
- Cierra otras aplicaciones que usen CPU/GPU
- Actualiza los controladores de gráficos
Páginas Relacionadas
- Vista Previa 3D — Visualizar ejecución con superposición de cámara
- Enmarcando Trabajos — Verificar posición del trabajo
- Ajustes Generales — Configuración de máquina