相机集成
Rayforge 支持 USB 相机集成,用于精确的材料对齐和定位。相机叠加功能允许您准确看到激光将在材料上的何处切割或雕刻,消除猜测并减少材料浪费。
设置工作流程
设置相机包括四个步骤:
- 添加相机 — 连接相机并将其添加到机器配置中
- 调整图像设置 — 调整亮度、对比度、白平衡和降噪
- 校准镜头 — 使用校准向导或手动系数校正畸变
- 对齐相机 — 将相机像素映射到机器坐标以实现精确定位
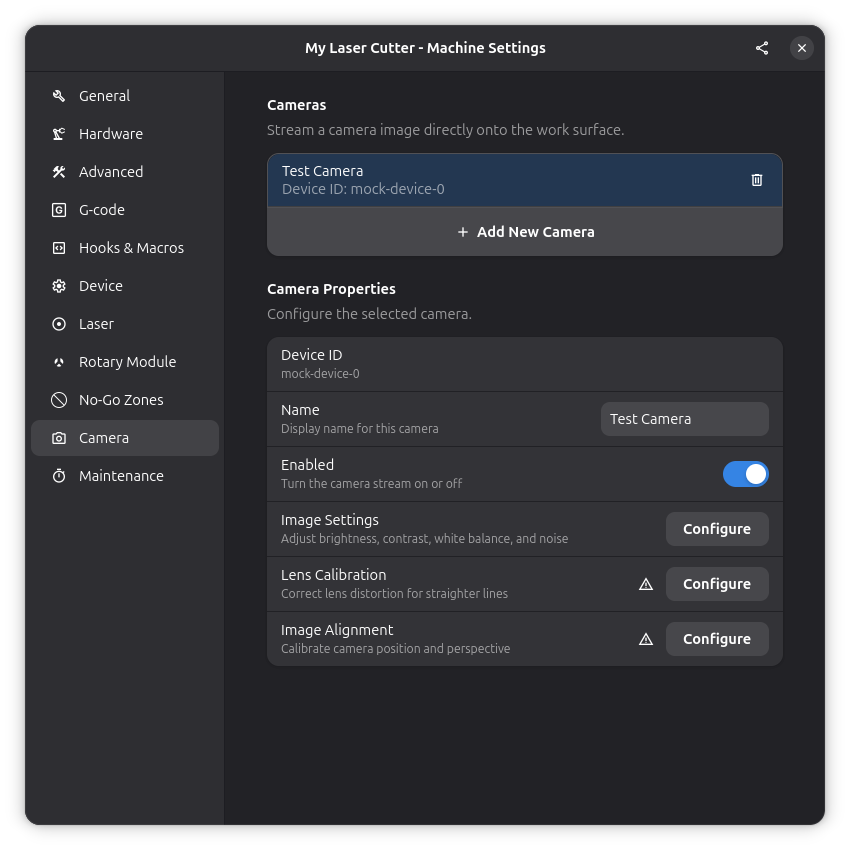
步骤 2-4 从相机属性面板访问,状态图标一目了然地显示完成情况:
- ✓ 镜头校准 — 校准已完成
- ⚠ 图像对齐 — 警告需要重新对齐(例如,在镜头校准后)
- ✓ 图像对齐 — 对齐是最新且有效的
第 1 步:添加相机
硬件要求
兼容的相机:
- USB 网络摄像头(最常见)
- 笔记本电脑内置相机(如果在靠近机器的笔记本电脑上运行 Rayforge)
- Linux 上 Video4Linux2(V4L2)支持的任何相机或 Windows 上的 DirectShow
推荐的设置:
- 相机安装在工作区域上方,视野清晰
- 一致的照明条件
- 相机定位以捕获激光工作区域
- 安全安装以防止相机移动
添加相机
-
连接相机到您的计算机,通过 USB
-
打开相机设置:
- 导航到 设置 → 首选项 → 相机
- 或使用相机工具栏按钮
-
添加新相机:
- 点击 "+" 按钮添加相机
- 输入描述性名称(例如,"顶部相机"、"工作区域相机")
- 从下拉菜单中选择设备
- Linux 上:
/dev/video0、/dev/video1等 - Windows 上:相机 0、相机 1 等
- Linux 上:
-
启用相机:
- 切换相机启用开关
- 实时画面应显示在画布上
第 2 步:调整图像设置
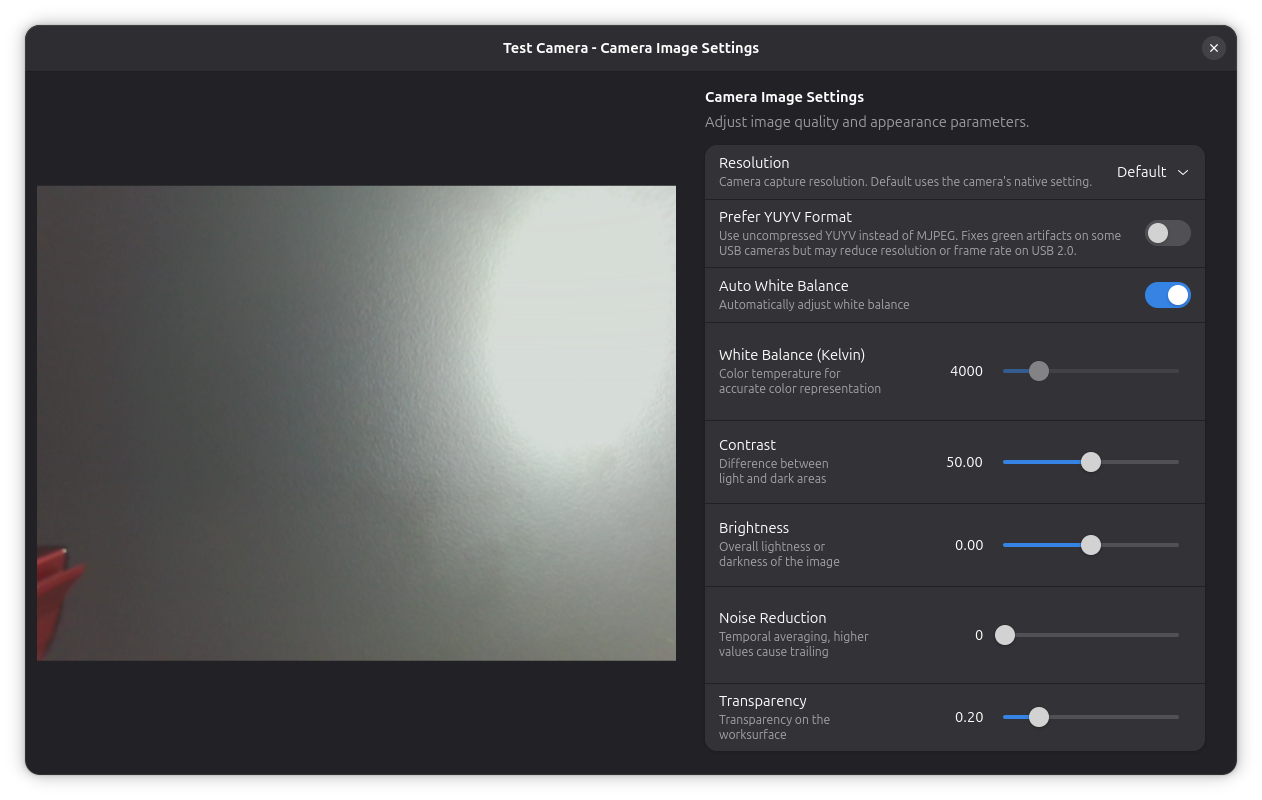
点击相机属性中图像设置旁边的配置以打开图像设置对话框。调整这些参数以获得清晰的相机视图:
| 设置 | 描述 |
|---|---|
| 亮度 | 整体图像亮度(-100 到 +100) |
| 对比度 | 边缘定义和对比度(0 到 100) |
| 优先 YUYV | 使用未压缩的 YUYV 而不是 MJPEG。较慢但可以修复某些故障 |
| 透明度 | 画布上的叠加不透明度(0% 不透明到 100% 透明) |
| 白平衡 | 色温校正(自动或 2500-10000K) |
| 降噪 | 时间噪声降低(0.0 到 0.95) |
YUYV 选项在您的相机使用默认 MJPEG 格式产生偏绿图像时很有用。请注意,YUYV 是未压缩的,可能会降低 USB 2.0 连接上可用的分辨率或帧率。
第 3 步:镜头校准
如果您的相机使用广角镜头或安装在倾斜角度,图像可能会显示可见的弯曲 — 直线看起来弯曲,特别是在画面边缘附近。这称为镜头畸变,即使您的 对齐点经过仔细测量,也可能影响对齐精度。
Rayforge 包含一个引导式校准向导,可以自动校正这种畸变。您也可以手动调整畸变系数。
镜头校准对话框
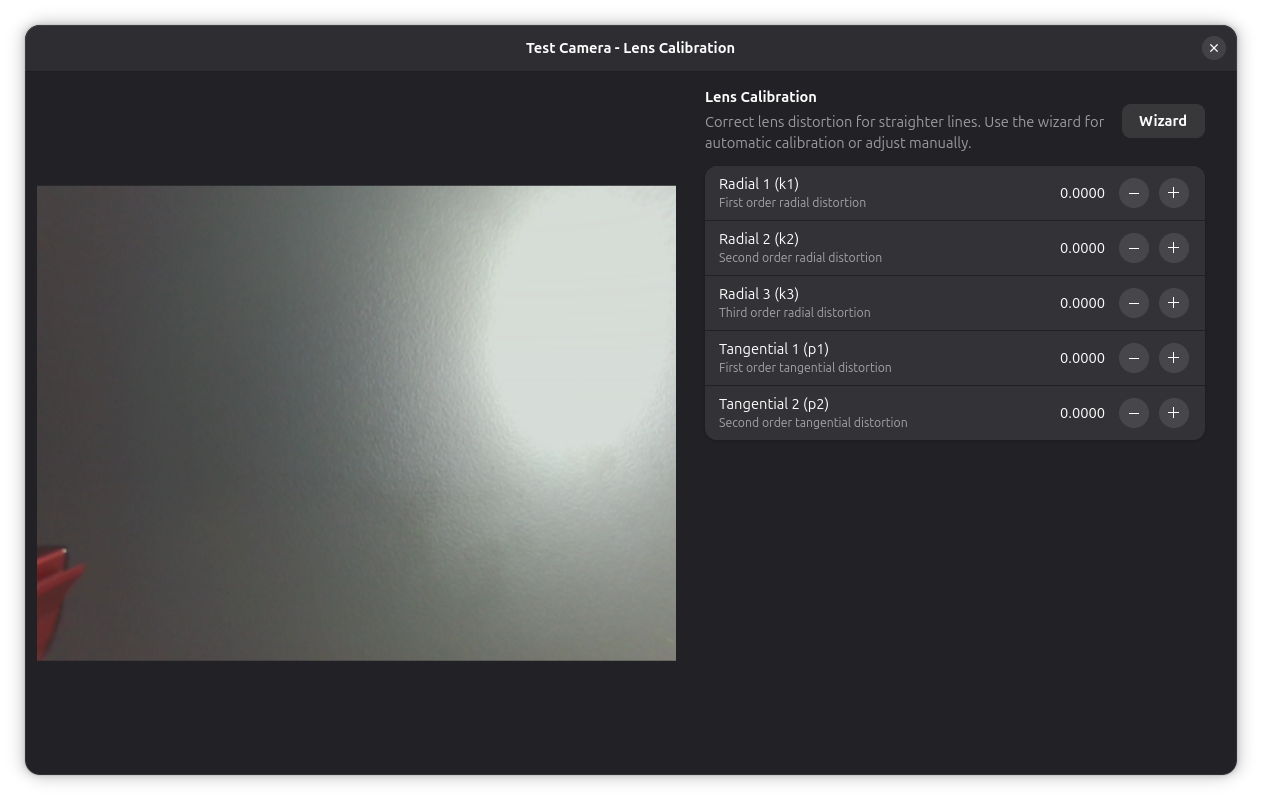
点击相机属性中镜头校准旁边的配置打开镜头校准对话框。从您可以:
- 手动调整畸变系数 — 微调径向(k1–k3)和切向(p1–p2)畸变参数
- 启动校准向导 — 点击向导按钮进行引导式自动校准
手动调整在校准向导计算出初始解后用于微调,或者当您知道镜头的大致畸变值时非常有用。
校准向导
校准向导引导您从床的不同位置捕获几张打印的校准卡图像。然后自动计算畸变模型。
第 1 步:配置校准卡
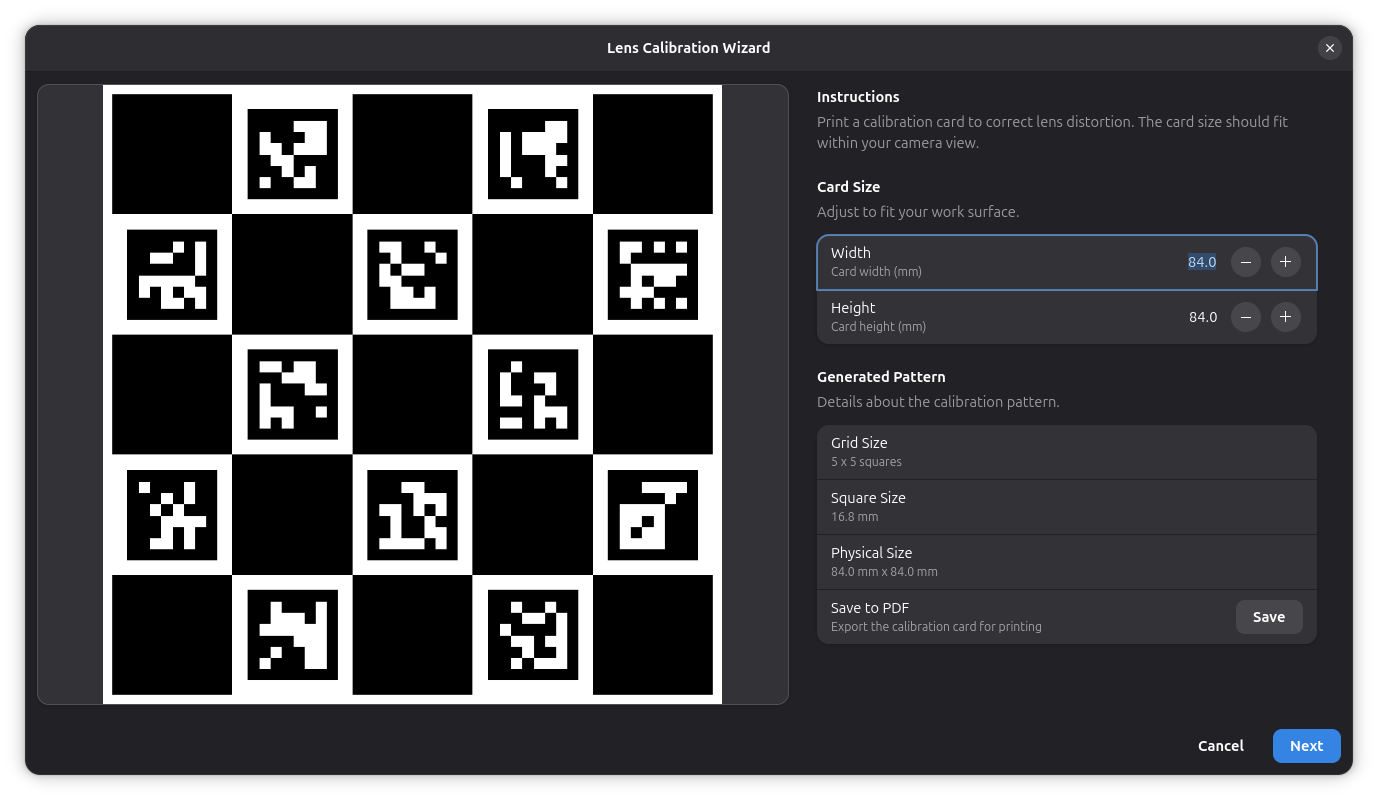
- 点击镜头校准对话框中的向导开始
- 设置打印卡的宽度和高度
- 预览实时更新 — 卡片应覆盖相机视图约 70%
- 点击保存为 PDF导出卡片以进行打印
- 打印卡片并放在激光床上
第 2 步:捕获帧
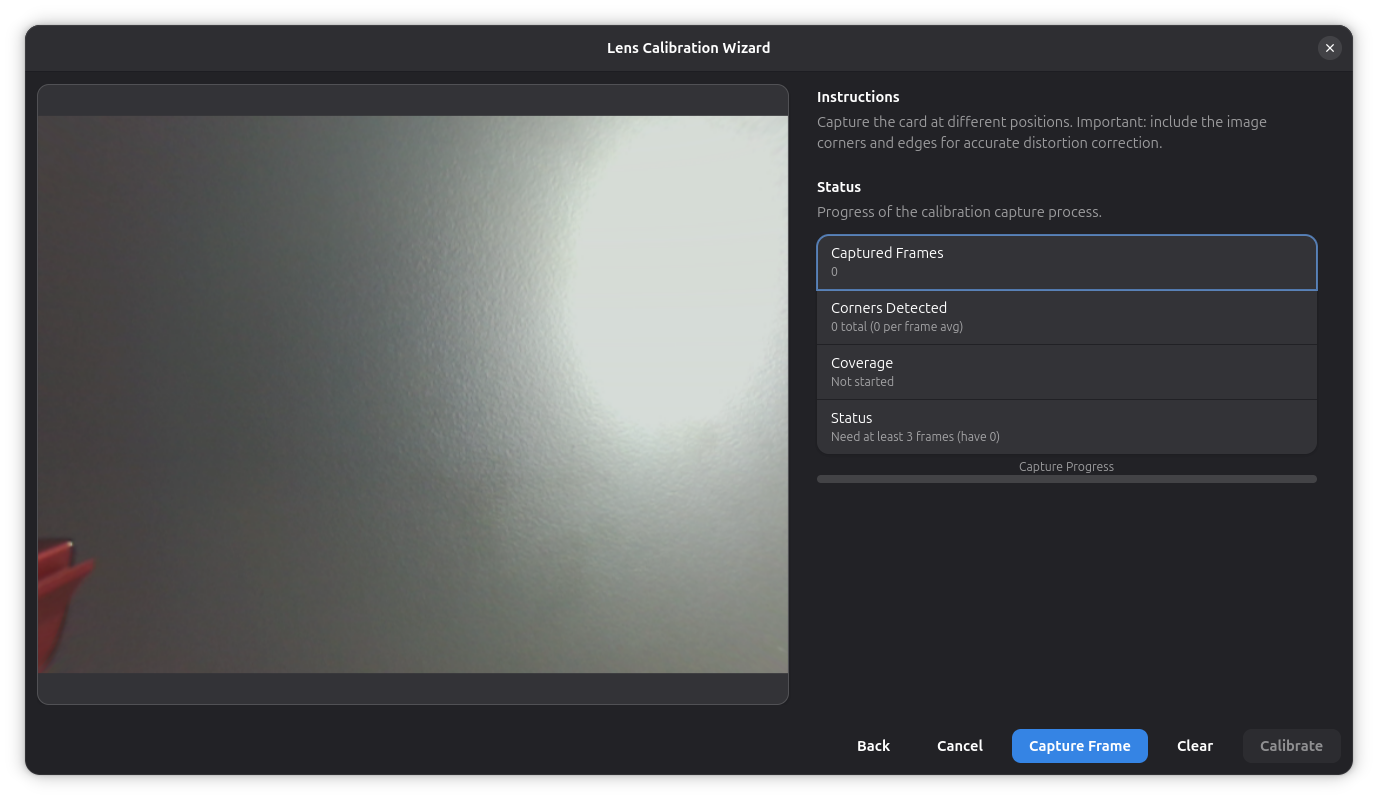
- 点击下一步进入捕获模式
- 在校准视图中不同位置和角度放置校准卡
- 每放置一个位置点击捕获帧
- 争取至少 8 次捕获,覆盖整个画面,包括角落和边缘
- 进��度条和状态指示器显示捕获质量
第 3 步:应用校准
- 一旦捕获足够多的帧,点击校准
- 计算的畸变系数自动应用于相机
- 相机叠加现在显示校正后的直线图像
第 4 步:图像对齐
相机对齐校准相机像素与现实世界坐标之间的关系,实现精确定位。
为什么需要对齐
相机从上方看到工作区域,但图像可能是:
- 相对于机器轴旋转
- X 和 Y 方向缩放不同
- 镜头透视扭曲
对齐创建一个转换矩阵,将相机像素映射到机器坐标。
对齐过程
-
打开对齐对话框:
- 点击相机属性中图像对齐旁边的配置按钮
- 对话框显示相机画面与当前对齐叠加
-
放置对齐标记:
- 您需要至少 3 个参考点(推荐 4 个以获得更好的精度)
- 对齐点应分布在工作区域中
- 使用已知位置,如:
- 机器原点位置
- 尺子标记
- 预切割对齐孔
- 校准网格
-
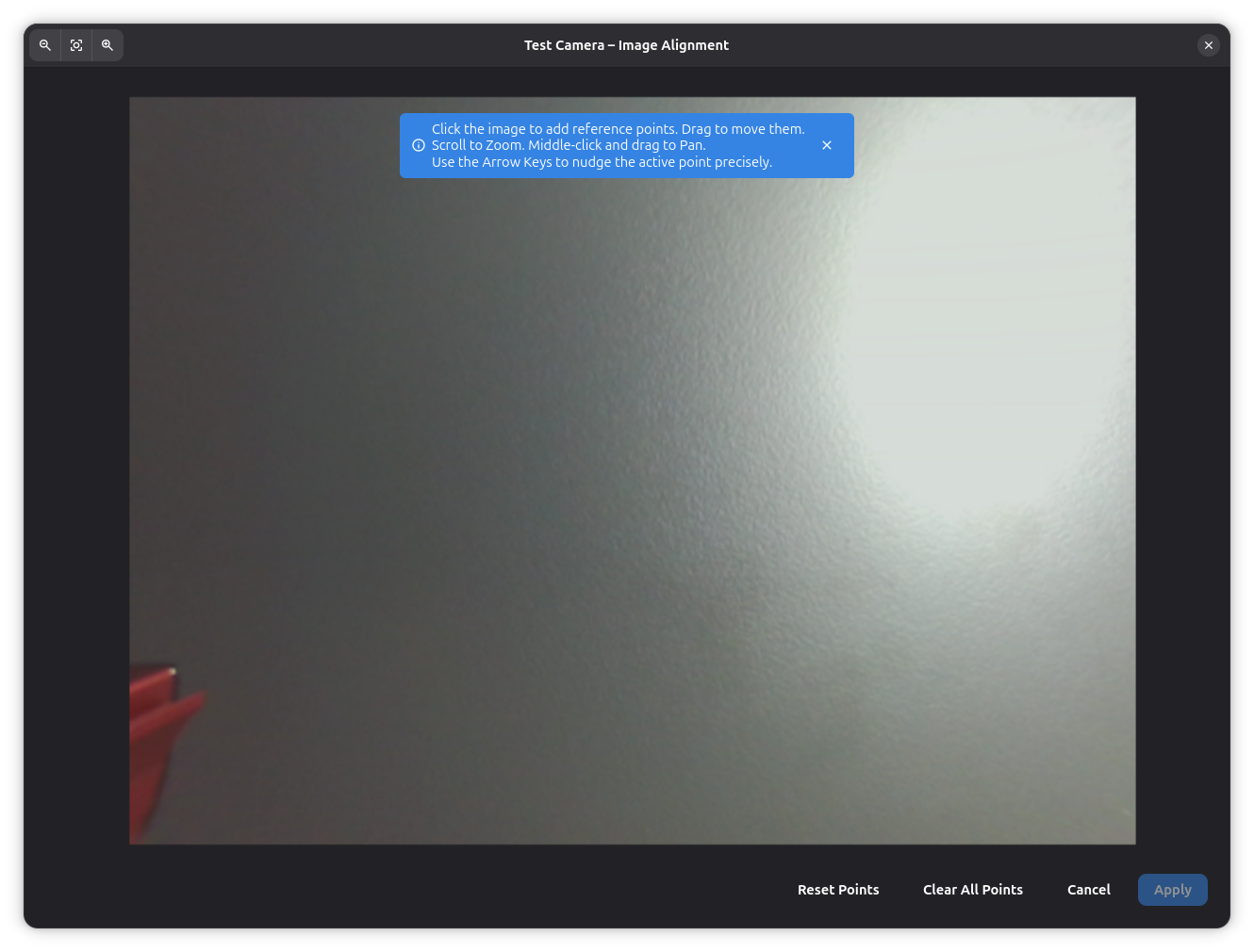
标记图像点:
- 点击相机图像在已知位置放置点
- 出现气泡小部件显示点坐标
- 对每个参考点重复
-
输入世界坐标:
- 对于每个图像点,输入真实的 X/Y 坐标(mm)
- 这些是每个点所在的实际机器坐标
- 用尺子准确测量或使用已知的机器位置
-
应用对齐:
- 点击应用计算转换
- 相机叠加现在将正确对齐
-
验证对齐:
- 将激光头移动到已知位置
- 检查激光点与相机视图中的预期位置对齐
- 如需要,通过重新对齐进行微调
对齐状态
相机属性面板显示带图标的对齐状态:
- 对号 — 对齐是最新且有效的
- 警告 — 需要重新对齐。当镜头校准更新时会发生这种情况,因为畸变校正会改变相机图像并使现有对齐无效。您的对齐点会保留 — 只需打开对话框并再次点击应用即可。
示例工作流程
- 将激光移动到原点位置 (0, 0) 并在相机中标记
- 将激光移动到 (100, 0) 并在相机中标记
- 将激光移动到 (100, 100) 并在相机中标记
- 将激光移动到 (0, 100) 并在相机中标记
- 为每个点输入精确坐标
- 应用并验证
- 使用工作区域角落的点以获得最大覆盖
- 避免在一个区域聚集点
- 仔细测量世界坐标 - 这里的准确性决定了整体对齐质量
- 如果移动相机或更改对焦距离,请重新对齐
- 更新镜头校准后重新对齐
- 保存您的对齐 - 它在会话之间持续存在
使用相机叠加
对齐后,相机叠加帮助准确定位作业。通过点击主窗口工具栏��中的相机图标切换。
多相机
Rayforge 支持多个相机用于不同视图或机器:
- 在首选项中添加多个相机
- 每个相机可以有独立的对齐
- 使用相机选择器在相机之间切换
- 用例:
- 顶视图 + 侧视图用于 3D 物体
- 不同机器的不同相机
- 广角 + 细节相机
故障排除
相机未检测到
问题: 相机未出现在设备列表中。
解决方案:
Linux: 检查系统是否识别相机:
# 列出视频设备
ls -l /dev/video*
# 使用 v4l2 检查相机
v4l2-ctl --list-devices
# 使用其他应用程序测试
cheese # 或 VLC 等
对于 Snap 用户:
# 授予相机访问权限
sudo snap connect rayforge:camera
Windows:
- 检查设备管理器中的"相机"或"成像设备"下的相机
- 确保没有其他应用程序正在使用相机(关闭 Zoom、Skype 等)
- 尝试不同的 USB 端口
- 更新相机驱动程序
相机显示黑屏
问题: 相机检测到但没有图像。
可能的原因:
- 相机被其他应用程序使用 - 关闭其他视频应用程序
- 选择了错误的设备 - 尝试不同的设备 ID
- 相机权限 - 在 Linux Snap 上,确保相机接口已连接
- 硬件问题 - 使用其他应用程序测试相机
解决方案:
# Linux:释放相机设备
sudo killall cheese # 或其他相机应用程序
# 检查哪个进程正在使用相机
sudo lsof /dev/video0
对齐不准确
问题: 相机叠加与真实激光位置不匹配。
诊断:
- 对齐点不足 - 使用至少 4 个点
- 测量误差 - 仔细检查世界坐标
- 相机移动 - 如果相机位置更改,请重新对齐
- 非线性畸变 - 可能需要镜头校准
提高精度:
- 使用更多对齐点(对于非常大的区域,使用 6-8 个)
- 将点分布在整个工作区域
- 非常仔细地测量世界坐标
- 使用机器移动命令精确地将激光定位在已知坐标
- 任何相机调整后重新对齐
图像质量差
问题: 相机图像模糊、太暗或过亮。
解决方案:
- 在相机设置中调整亮度/对比度
- 改善照明 - 添加一致的工作区域照明
- 清洁相机镜头 - 灰尘和碎屑会降低清晰度
- 检查对焦 - 自动对焦可能效果不佳;如可能请使用手动
- 暂时降低透明度以更清楚地看到相机图像
- 尝试不同的白平衡设置
- 如果图像显得颗粒状,调整降噪设置
相机延迟或卡顿
问题: 实时相机画面不流畅或延迟。
解决方案:
- 在设备设置中降低相机分辨率(如果可访问)
- 关闭其他使用 CPU/GPU 的应用程序
- 更新图形驱动程序