硬件设置
机器设置中的硬件页面配置机器的物理尺寸、坐标系统和移动限制。
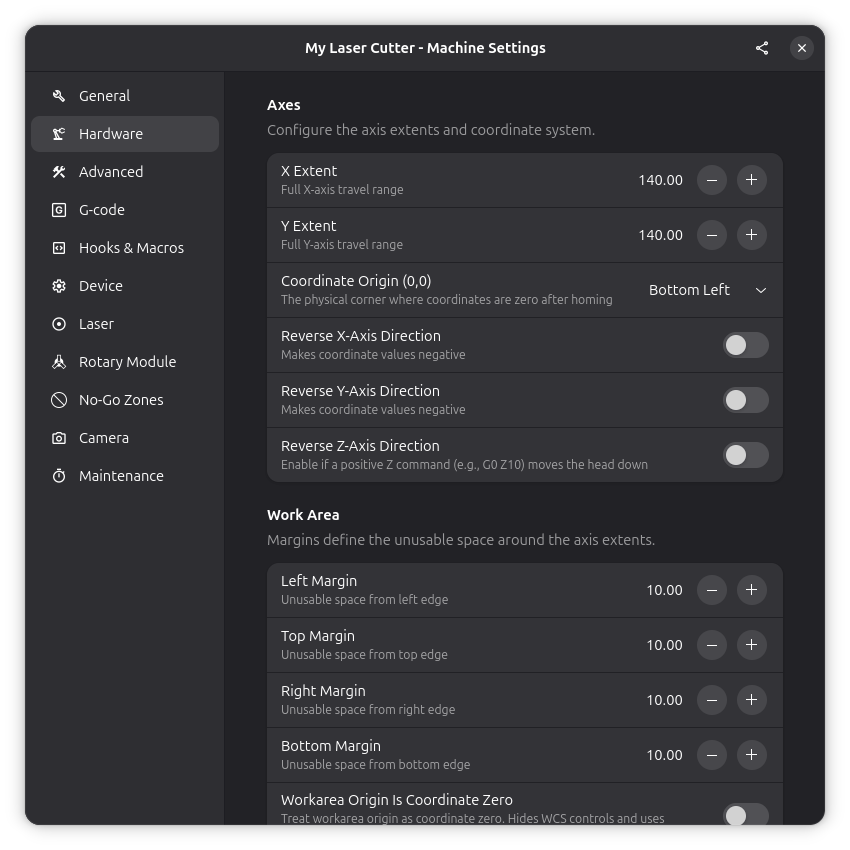
轴
配置机器的轴范围和坐标系统。
X/Y 范围
每个轴在机器单位中的完整行程范围。
- 测量实际切割区域,而不是机器外部
- 考虑任何障碍物或限制
- 例如:典型的 K40 激光为 400
坐标原点
选择机器坐标原点 (0,0) 的位置。这决定了坐标的解释方式。
- 左下角:GRBL 设备最常见。X 向右增加,Y 向上增加。
- 左上角:某些 CNC 风格的机器常见。X 向右增加,Y 向下增加。
- 右上角:X 向左增加,Y 向下增加。
- 右下角:X 向左增加,Y 向上增加。
查找原点
- 使用归零按钮归零机器
- 观察激光头移动到的位置
- 该位置就是您的 (0,0) 原点
信息
坐标原点设置影响 G 代码的生成方式。确保它与您的固件归零配置匹配。
轴方向
如需要,反转任何轴的方向:
- 反转 X 轴方向:使 X 坐标值为负
- 反转 Y 轴方向:使 Y 坐标值为负
- 反转 Z 轴方向:如果正 Z 命令(例如 G0 Z10)使头向下移动,则启用
工作区域
边距定义轴范围边缘周围不可使用的空间。当您的机器有激光无法到达的区域(例如,由于激光头组件、电缆链或其他障碍物)时,这很有用。
- 左/上/右/下边距:从每个边缘开始的不可使用空间(机器单位)
设置边距后,工作区域(可用空间)计算为轴范围减去边距。
软限位
可配置的点动机器头的安全边界。启用后,点动控制将阻止超出这些限制的移动。
- 启用自定义软限位:切换以使用自定义限制而不是工作表面边界
- X/Y 最小值:每个轴的最小坐标
- X/Y 最大值:每个轴的最大坐标
软限位自动限制在轴范围内(0 到范围值�)。
提示
使用软限位保护工作表面上永远不应到达的区域,例如有夹具或敏感设备的区域。