Нижня панель
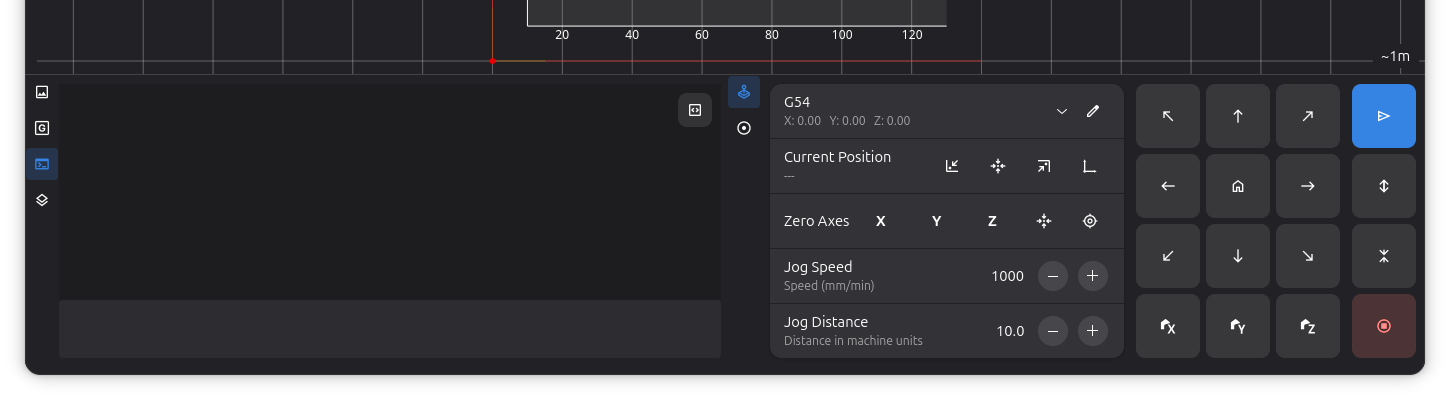
Нижня панель в нижній частині вікна Rayforge надає ручний контроль над позицією вашого лазерного різака, статус машини в реальному часі, перегляд журналу для моніторингу операцій, переглядач G-code та браузер ресурсів.
Огляд
Нижня панель об'єднує кілька функцій в одному зручному інтерфейсі:
- Прикріплювані вкладки: Перемикайтесь між Консоллю, Переглядачем G-code та Ресурсами за допомогою смуги іконок зліва
- Контролі переміщення: Ручне переміщення та позиціонування (завжди видимі)
- Статус машини: Позиція та стан з'єднання в реальному часі
- Робоча система координат (WCS): Швидкий вибір WCS (завжди видимі)
Кожна область панелі має смугу іконок вкладок зліва, яка дозволяє перемикатися між Консоллю, Переглядачем G-code та браузером Ресурсів. Контролі переміщення та керування WCS з правого боку залишаються видимими незалежно від того, яка вкладка активна. Вкладки можна впорядкувати перетягуванням в межах їхньої смуги, а також перетягувати між областями панелі або на роздільники, щоб змінити макет на кілька стовпців. Порожні стовпці видаляються автоматично.
Доступ до нижньої панелі
Нижня панель може бути переключена через:
- Меню: Вид → Нижня панель
- Гаряча клавіша: Ctrl+L
Контролі переміщення доступні тільки при підключенні до машини, яка підтримує операції переміщення.
Контролі переміщення
Контролі переміщення надають ручний контроль над позицією вашого лазерного різака, дозволяючи точно переміщувати лазерну головку для налаштування, вирівнювання та тестування.
Контролі калібрування
Калібруйте осі вашої машини для встановлення референсної позиції:
| Кнопка | Функція | Опис |
|---|---|---|
| Home All | Калібрує всі осі | Калібрує всі осі одночасно |
Рекомендується калібрувати всі осі перед початком будь-якої роботи для забезпечення точного позиціонування.
Направлене переміщення
Контролі переміщення надають кнопки для направленого переміщення:
↖ ↑ ↗
← • →
↙ ↓ ↘
| Кнопка | Переміщення | Гаряча клавіша |
|---|---|---|
| ↑ | Y+ (Y- якщо машина Y-перевернута) | Стрілка вгору |
| ↓ | Y- (Y+ якщо машина Y-перевернута) | Стрілка вниз |
| ← | X- (вліво) | Стрілка вліво |
| → | X+ (вправо) | Стрілка вправо |
| ↖ (вгору-вліво) | X- Y+/- (по діагоналі) | - |
| ↗ (вгору-вправо) | X+ Y+/- (по діагоналі) | - |
| ↙ (вниз-вліво) | X- Y-/+ (по діагоналі) | - |
| ↘ (вниз-вправо) | X+ Y-/+ (по діагоналі) | - |
| Z+ | Вісь Z вгору | Page Up |
| Z- | Вісь Z вниз | Page Down |
Гарячі клавіші працюють т��ільки коли головне вікно має фокус.
Візуальний зворотний зв'язок
Кнопки переміщення надають візуальний зворотний зв'язок:
- Нормально: Кнопка увімкнена та безпечна для використання
- Попередження (помаранчевий): Переміщення наближається або перевищує м'які обмеження
- Вимкнено: Переміщення не підтримується або машина не підключена
Налаштування переміщення
Налаштуйте поведінку операцій переміщення:
Швидкість переміщення:
- Діапазон: 1-60,000 мм/хв
- За замовчуванням: 1,000 мм/хв
- Призначення: Контролює, як швидко переміщується лазерна головка
- Використовуйте нижчі швидкості (100-500 мм/хв) для точного позиціонування
- Використовуйте вищі швидкості (1,000-3,000 мм/хв) для більших переміщень
- Дуже високі швидкості можуть спричинити пропущені кроки на деяких машинах
Відстань переміщення:
- Діапазон: 0.1-1,000 мм
- За замовчуванням: 10.0 мм
- Призначення: Контролює, як далеко переміщується лазерна головка за одне натискання кнопки
- Використовуйте малі відстані (0.1-1.0 мм) для точного налаштування
- Використовуйте середні відстані (5-20 мм) для загального позиціонування
- Використовуйте великі відстані (50-100 мм) для швидкого перепозиціонування
Відображення статусу машини
Нижня панель відображає інформацію про вашу машину в реальному часі:
Поточна позиція
Показує позицію лазерної головки в активній системі координат:
- Координати відносно вибраного початку WCS
- Оновлюється в реальному часі під час переміщення або виконання робіт
- Формат: значення X, Y, Z у міліметрах
Статус з'єднання
- Підключено: Зелений індикатор, машина відповідає
- Відключено: Сірий індикатор, немає з'єднання з машиною
- Помилка: Червоний індикатор, проблема зі з'єднанням або комунікацією
Стан машини
- Idle (бездіяльність): Машина готова до команд
- Run (робота): Робота зараз виконується
- Hold (пауза): Робота призупинена
- Alarm (тривога): Машина в стані тривоги
- Home (калібрування): Цикл калібрування виконується
Робоча система координат (WCS)
Нижня панель н��адає швидкий доступ до керування робочою системою координат.
Вибір активної системи
Виберіть, яка система координат зараз активна:
| Опція | Тип | Опис |
|---|---|---|
| G53 (Machine) | Фіксована | Абсолютні координати машини, не можуть бути змінені |
| G54 (Work 1) | Користувацька | Перша робоча система координат |
| G55 (Work 2) | Користувацька | Друга робоча система координат |
| G56 (Work 3) | Користувацька | Третя робоча система координат |
| G57 (Work 4) | Користувацька | Четверта робоча система координат |
| G58 (Work 5) | Користувацька | П'ята робоча система координат |
| G59 (Work 6) | Користувацька | Шоста робоча система координат |
Встановлення нуля WCS
Ви�значте, де має бути початок активної WCS:
| Кнопка | Функція | Опис |
|---|---|---|
| Click to Zero | Встановити X,Y=0 | Клацніть на іконку прицілу, потім на полотні, щоб встановити робочий нуль |
| Go to WCS Zero | Перемістити | Перемістити лазерну головку до X0 Y0 активної WCS |
| Edit Offsets | Редагувати | Ручне редагування значень зміщення WCS |
| Zero X | Встановити X=0 | Робить поточну позицію X початком X для активної WCS |
| Zero Y | Встановити Y=0 | Робить поточну позицію Y початком Y для активної WCS |
| Zero Z | Встановити Z=0 | Робить поточну позицію Z початком Z для активної WCS |
Кноп�ки Zero вимкнені коли вибрано G53 (координати машини), оскільки координати машини фіксовані апаратно.
- Підключіться до машини та відкалібруйте всі осі
- Виберіть WCS, який ви хочете налаштувати (наприклад, G54)
- Перемістіть лазерну головку в бажану позицію початку координат
- Натисніть Zero X та Zero Y, щоб встановити цю позицію як (0, 0)
- Зміщення зберігається в контролері вашої машини
Вкладка консолі
Вкладка консолі надає інтерактивний інтерфейс у стилі терміналу для в��ідправки G-code команд та моніторингу комунікації машини. Натисніть іконку консолі на смузі вкладок, щоб перейти до цього вигляду.
Введення команд
Поле введення команд дозволяє відправляти "сирий" G-code безпосередньо на машину:
- Підтримка кількох рядків: Вставте або введіть кілька команд
- Enter: Відправляє всі команди
- Shift+Enter: Вставляє новий рядок (для редагування перед відправкою)
- Історія: Використовуйте стрілки вгору/вниз для навігації по раніше відправленим командам
Відображення журналу
Журнал показує комунікацію між Rayforge та вашою машиною з підсвічуванням синтаксису для легкого читання:
- Користувацькі команди (синій): Команди, які ви ввели або відправили під ч��ас робіт
- Часові мітки (сірий): Час кожного повідомлення
- Помилки (червоний): Повідомлення про помилки від машини
- Попередження (помаранчевий): Попереджувальні повідомлення
- Опитування статусу (тьмяно): Звіти про позицію/статус в реальному часі, такі як
<Idle|WPos:0.000,0.000,0.000|...>
Детальний режим
Натисніть іконку терміналу у верхньому правому куті консолі для перемикання детального виводу:
- Вимкнено (за замовчуванням): Приховує часті опитування статусу та відповіді "ok"
- Увімкнено: Показує всю комунікацію з машиною
Поведінка авто-прокрутки
Консоль автоматично прокручується для показу нових повідомлень:
- Прокрутка в��гору вимикає авто-прокрутку, щоб ви могли переглянути історію
- Прокрутка вниз знову вмикає авто-прокрутку
- Нові повідомлення з'являються негайно коли авто-прокрутка активна
Використання консолі для виправлення проблем
Консоль незамінна для діагностики проблем:
- Перевірте, що команди відправляються правильно
- Перевірте наявність повідомлень про помилки від контролера
- Моніторте статус з'єднання та стабільність
- Переглядайте прогрес виконання роботи в реальному часі
- Відправляйте діагностичні команди (наприклад,
$$для перегляду налаштувань GRBL)
Вкладка перегляду G-code
Вкладка перегляду G-code показує згенерований G-code для поточних операцій. Натисніть іконку G-code на смузі вкладок, щоб перейти до цього вигляду.
Функції
- Підсвічування синтаксису: Команди G-code кольорокодовані для зручності читання
- Підсвічування рядків: Рядок, що виконується, підсвічується під час виконання роботи
- Автоматичне оновлення: Вміст G-code оновлюється автоматично при зміні операцій або налаштувань документа
Вкладка ресурсів
Вкладка ресурсів показує всі заготовки та ескізи у вашому документі. Натисніть іконку ресурсів на смузі вкладок, щоб перейти до цього вигляду.
Коли список ресурсів порожній, відображаються кнопки для додавання заготовки або створення нового ескізу. Ви можете перетягувати ресурси з цього списку на полотно для їх розміщення. Подвійне натискання на ��ресурс заготовки відкриває його властивості.
Натискання правою кнопкою миші на ресурс відкриває контекстне меню з параметрами створення нової робочої деталі з ресурсу, дублювання, копіювання, вирізання або видалення. Натискання правою кнопкою миші на порожньому місці в списку ресурсів пропонує параметри створення нового ескізу, додавання заготовки, імпорту файлу або вставки з буфера обміну.
Коли активна вкладка Консолі або Переглядача G-code, ви також можете натиснути Ctrl+F для пошуку в вмісті.
Керування лазером
Док Laser забезпечує ручне керування вашим лазером для тестування, вирівнювання та фокусування. Він відображається як вкладка поруч із доком Керування в нижній панелі.
Вибір лазерної головки
Випадаючий список показує всі налаштовані л�азерні головки. Якщо ваша машина має кілька головок, виберіть ту, якою хочете керувати. Підзаголовок показує номер інструменту та максимальну потужність обраної головки.
Кнопка перемикання
Кнопка перемикання поруч із селектором головки вмикає або вимикає лазер. Коли лазер активний, кнопка стає червоною як індикатор безпеки. Лазер також можна перемикати кнопкою на панелі інструментів у заголовку головного вікна.
Потужність
Повзунок і текстове поле керують потужністю лазера від 0 до 100 відсотків. Коли ви перемикаєтеся на іншу лазерну головку, потужність скидається до налаштованої потужності фокусування цієї головки.
Частота та ширина імпульсу
Ці елементи керування з'являються лише тоді, коли обрана лазерна головка має тип CO2 або Fiber. Вони дозволяють встановити частоту ШІМ (Гц) та ширину імпульсу (мікросекунди) для ручної роботи лазера. Для діодних лазерів ці поля приховані.
Тривалість (таймер автоматичного вимкнення)
Встановіть тривалість у секундах, після якої лазер автоматично вимкнеться. Встановіть 0 для безперервної роботи — лазер залишається увімкненим, поки ви не вимкнете його вручну. Під час роботи таймера під елементами керування з'являється мітка зворотного відліку.
Безпека
- Усі елементи керування вимкнені, якщо лазерні головки не налаштовані
- Кнопка перемикання вимагає активного підключ��ення до машини
- Якщо машина від'єднується під час роботи лазера, лазер автоматично вимикається, а будь-який запущений таймер скасовується
Сумісність з машинами
Нижня панель адаптується до можливостей вашої машини:
Підтримка осей
- Вісь X/Y: Підтримується практично всіма лазерними різаками
- Вісь Z: Доступна тільки на машинах з контролем Z-осі
- Діагональне переміщення: Вимагає підтримки обох осей X та Y
Типи машин
| Тип машини | Підтримка переміщення | Примітки |
|---|---|---|
| GRBL (v1.1+) | Повна | Підтримує всі фун�кції переміщення |
| Smoothieware | Повна | Підтримує всі функції переміщення |
| Кастомні контролери | Змінна | Залежить від реалізації |
Функції безпеки
М'які обмеження
Коли м'які обмеження увімкнено в профілі вашої машини:
- Кнопки показують помаранчеве попередження при наближенні до обмежень
- Переміщення автоматично обмежується для запобігання виходу за межі
- Надає візуальний зворотний зв'язок для запобігання зіткненням
Статус з'єднання
- Всі контролі вимкнені коли немає з'єднання з машиною
- Кнопки оновлюють чутливіст�ь залежно від стану машини
- Запобігає випадковому переміщенню під час операції
Пов'язані сторінки:
- Робочі системи координат (WCS) - Керування WCS
- Налаштування машини - Налаштування вашої машини
- Гарячі клавіші - Повний довідник гарячих клавіш
- Головне вікно - Огляд головного інтерфейсу
- Загальні налаштування - Конфігурація пристрою