raygeo.geo.shape.polygon3d
Functions
deduplicate_polyline_3d()
deduplicate_polyline_3d(polyline: Sequence[types.Point3D]) -> types.Polygon3D
Remove consecutive near-identical points from a 3D polyline.
Points whose squared distance is less than 1e-12 are collapsed.
| Parameter | Type | Description |
|---|---|---|
polyline | Sequence[types.Point3D] | Polyline as (x, y, z) points. |
| Returns | types.Polygon3D | Deduplicated polyline. |
| Complexity | O(n) |
fillet_polyline_3d()
fillet_polyline_3d(
polyline: Sequence[types.Point3D],
radius: float,
) -> types.Polygon3D
Fillet corners of a 3D polyline with circular arcs.
Each internal vertex with enough room on both adjacent edges is replaced by a circular arc of the given radius tangent to both edges.
| Parameter | Type | Description |
|---|---|---|
polyline | Sequence[types.Point3D] | Input polyline as (x, y, z) points. |
radius | float | Fillet radius (must be > 0). |
| Returns | types.Polygon3D | Filleted polyline (first and last points preserved). |
| Complexity | O(n) |
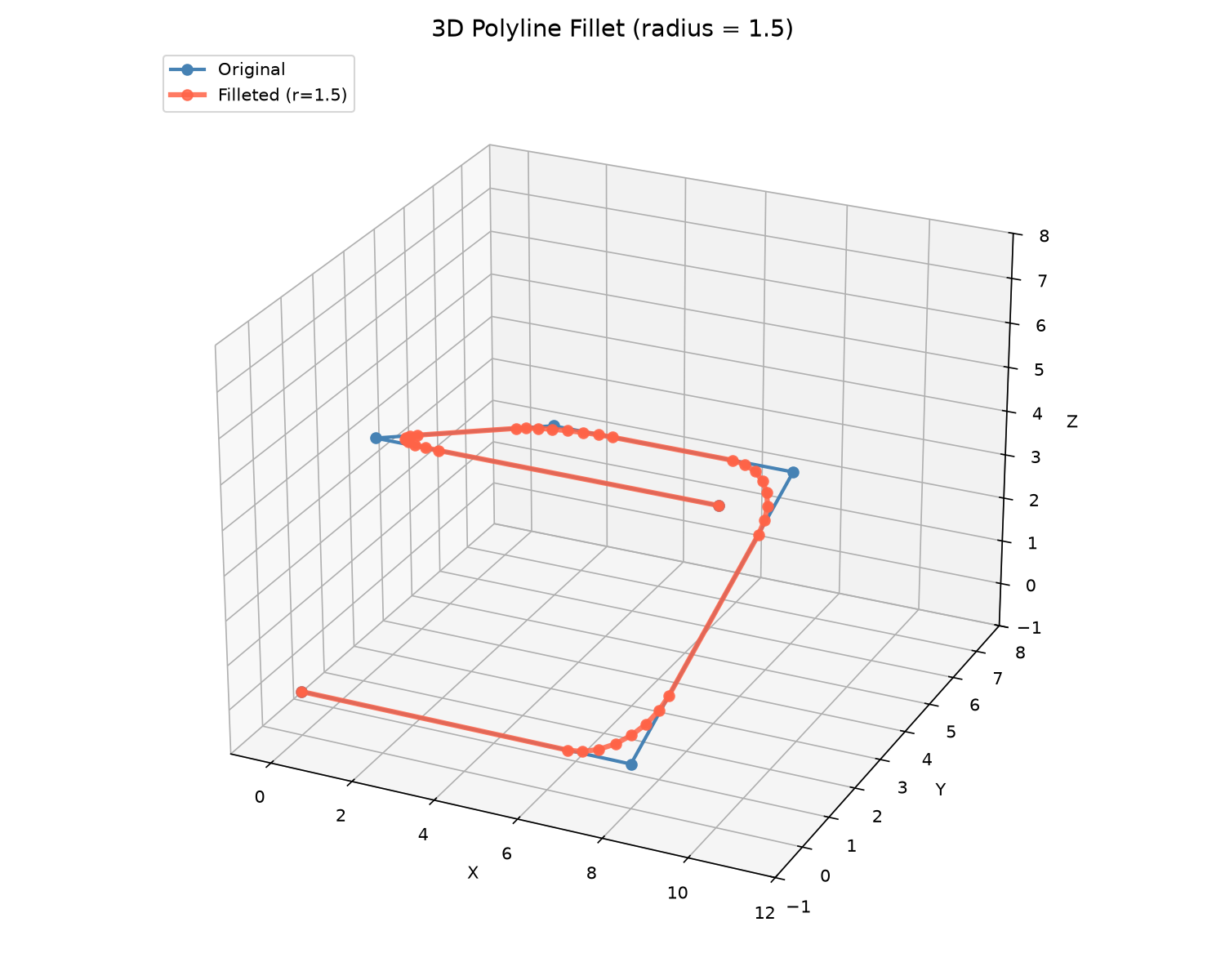
Fillet corners of a 3D polyline with circular arcs
flip_polygon_3d()
flip_polygon_3d(
polygon: Sequence[types.Point3D],
flip_h: bool = False,
flip_v: bool = False,
flip_z: bool = False,
) -> types.Polygon3D
Flip a 3D polygon horizontally, vertically, and/or along Z.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
flip_h | bool = False | Whether to flip horizontally (negate X). |
flip_v | bool = False | Whether to flip vertically (negate Y). |
flip_z | bool = False | Whether to flip along Z (negate Z). |
| Returns | types.Polygon3D | Flipped polygon. |
| Complexity | O(n) |
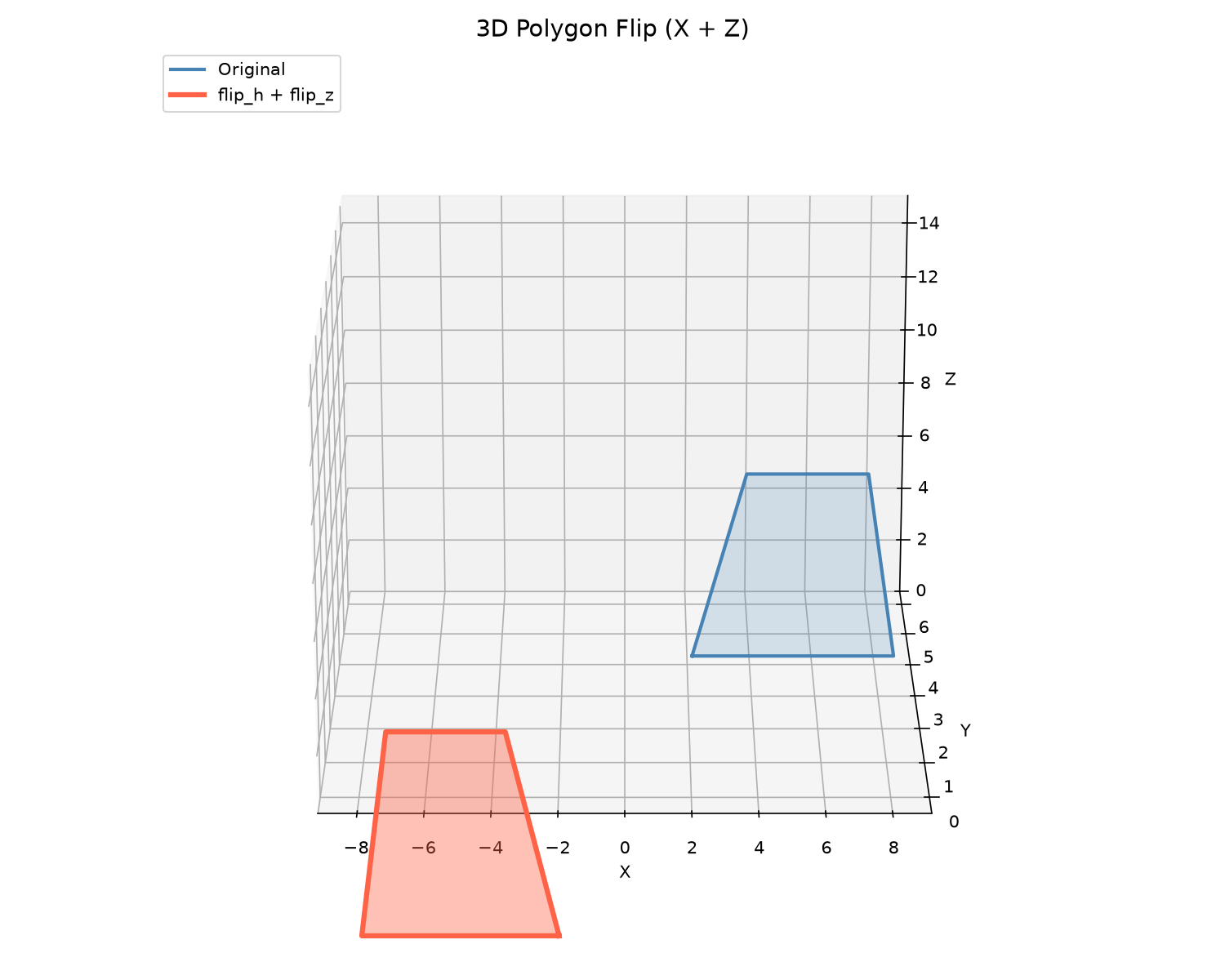
3D polygon flipped horizontally and along Z
flip_polygons_3d()
flip_polygons_3d(
polygons: Sequence[types.Polygon3D],
flip_h: bool = False,
flip_v: bool = False,
flip_z: bool = False,
) -> list[types.Polygon3D]
Flip multiple 3D polygons.
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[types.Polygon3D] | List of 3D polygons. |
flip_h | bool = False | Whether to flip horizontally (negate X). |
flip_v | bool = False | Whether to flip vertically (negate Y). |
flip_z | bool = False | Whether to flip along Z (negate Z). |
| Returns | list[types.Polygon3D] | Flipped polygons. |
| Complexity | O(n * m) |
get_polygon_area_3d()
get_polygon_area_3d(polygon: Sequence[types.Point3D]) -> float
XY-projected area of a 3D polygon (absolute shoelace area).
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | float | XY-projected area. |
| Complexity | O(n) |
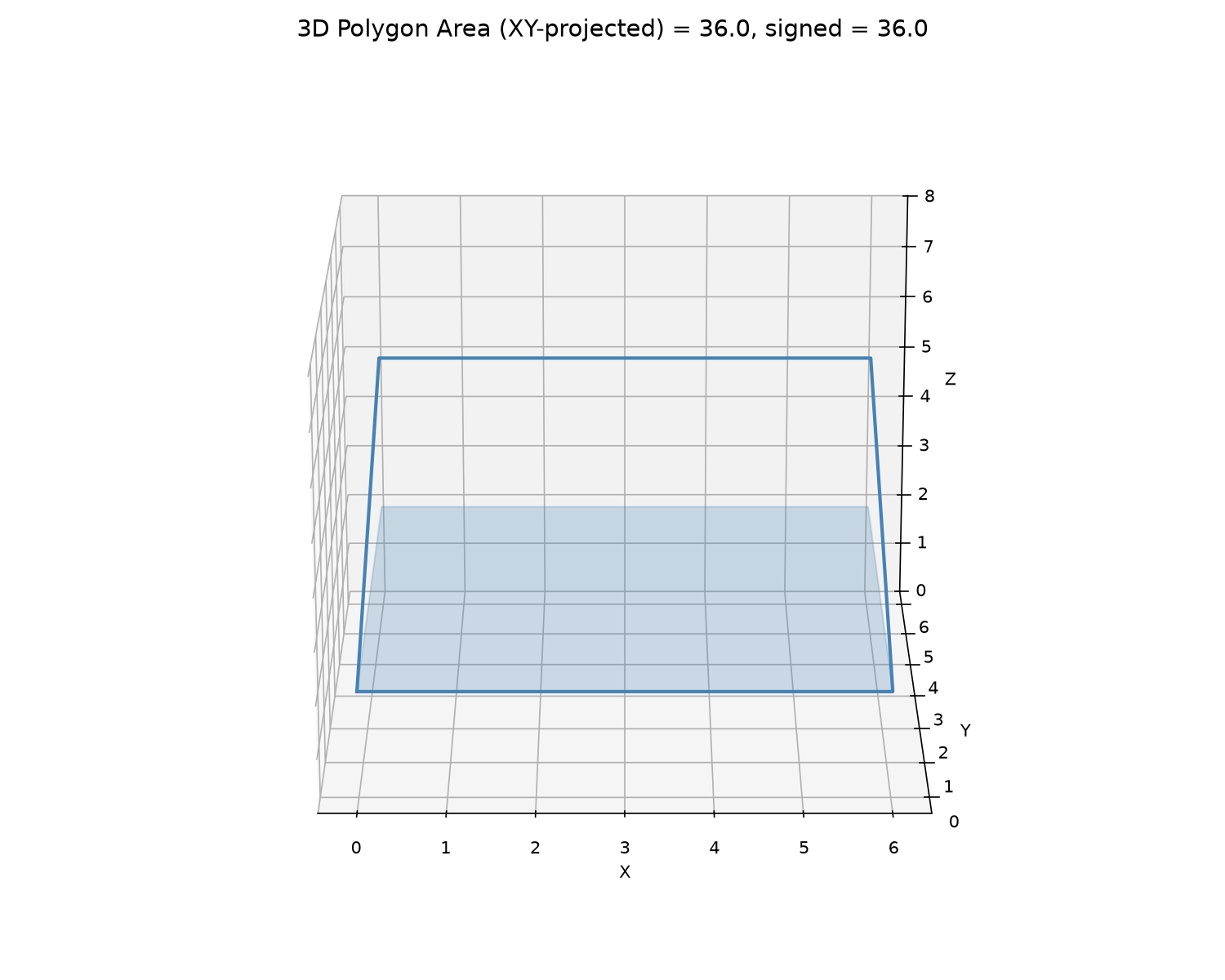
XY-projected (unsigned) area of a 3D polygon
get_polygon_bounds_3d()
get_polygon_bounds_3d(polygon: Sequence[types.Point3D]) -> types.Rect3D
Get the 3D bounding box of a polygon.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | types.Rect3D | Bounding box as (x_min, y_min, x_max, y_max, z_min, z_max). |
| Complexity | O(n) |
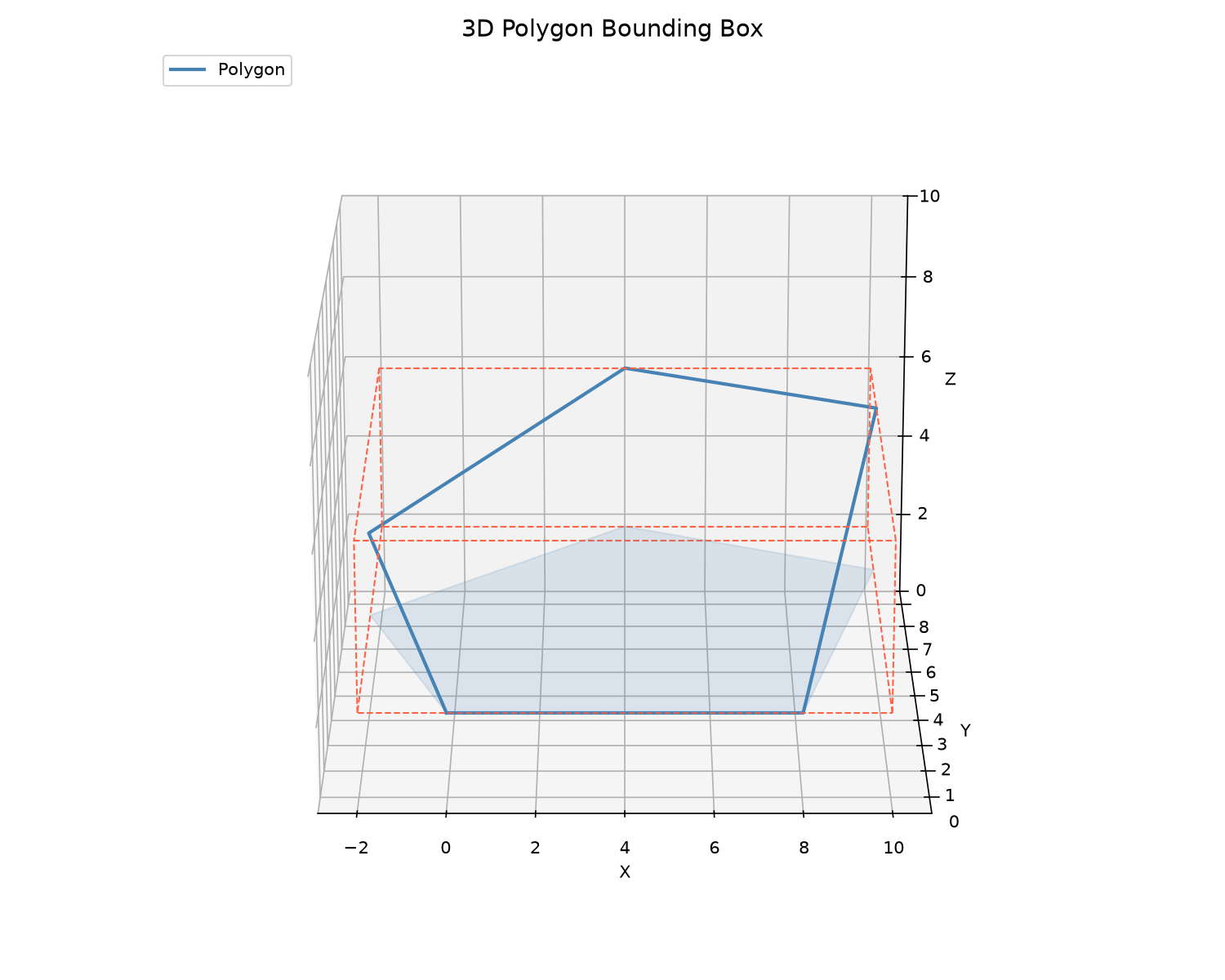
3D bounding box (Rect3D)
get_polygon_centroid_3d()
get_polygon_centroid_3d(polygon: Sequence[types.Point3D]) -> types.Point3D
Get the centroid of a 3D polygon.
XY centroid from shoelace formula, Z from average.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | types.Point3D | Centroid point (x, y, z). |
| Complexity | O(n) |
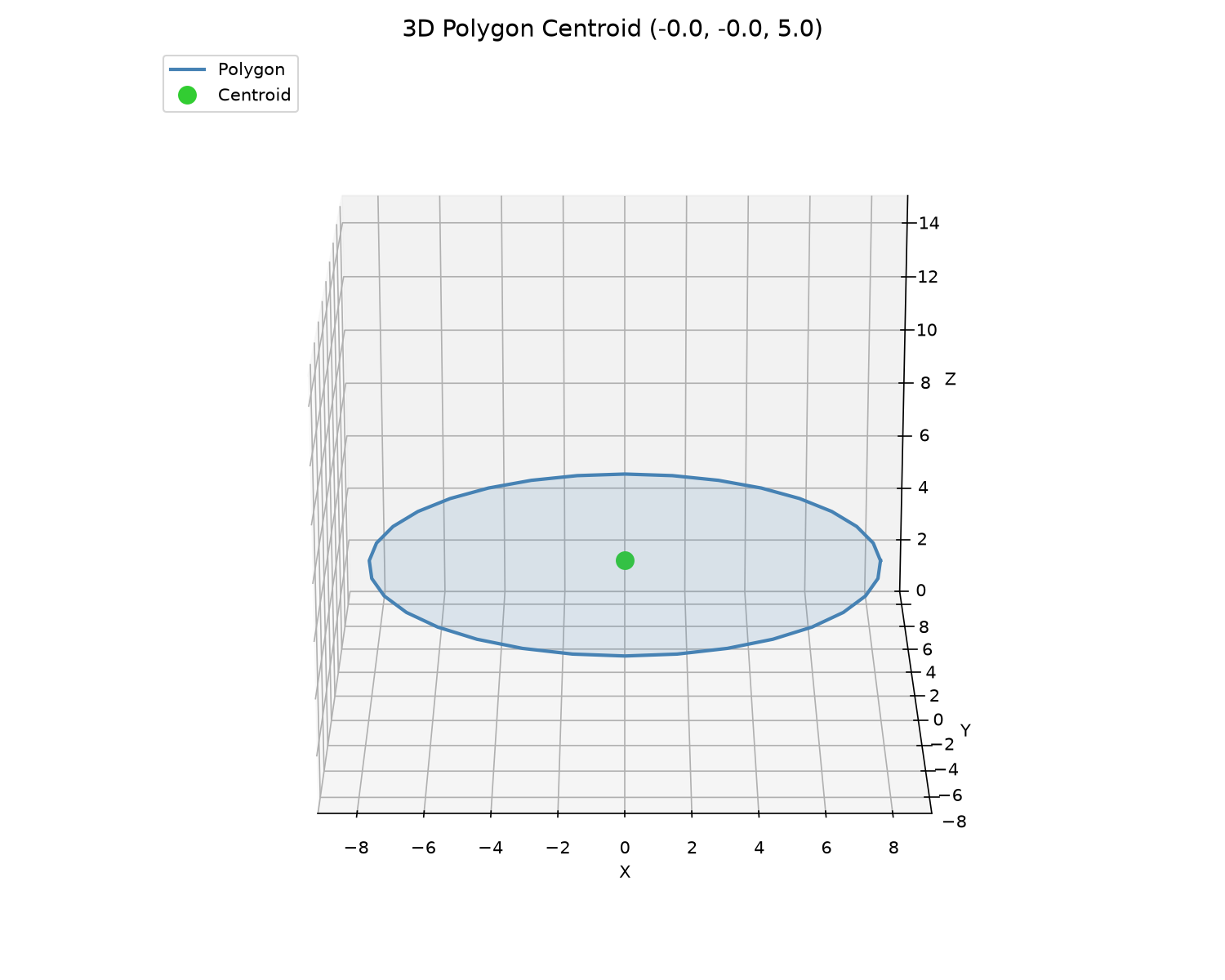
3D centroid - XY via shoelace, Z as average
get_polygon_convex_hull_3d()
get_polygon_convex_hull_3d(polygon: Sequence[types.Point3D]) -> types.Polygon3D
Get the convex hull of a 3D polygon (XY-plane, Z from first vertex).
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | types.Polygon3D | Convex hull as list of (x, y, z) points. |
| Complexity | O(n log n) |
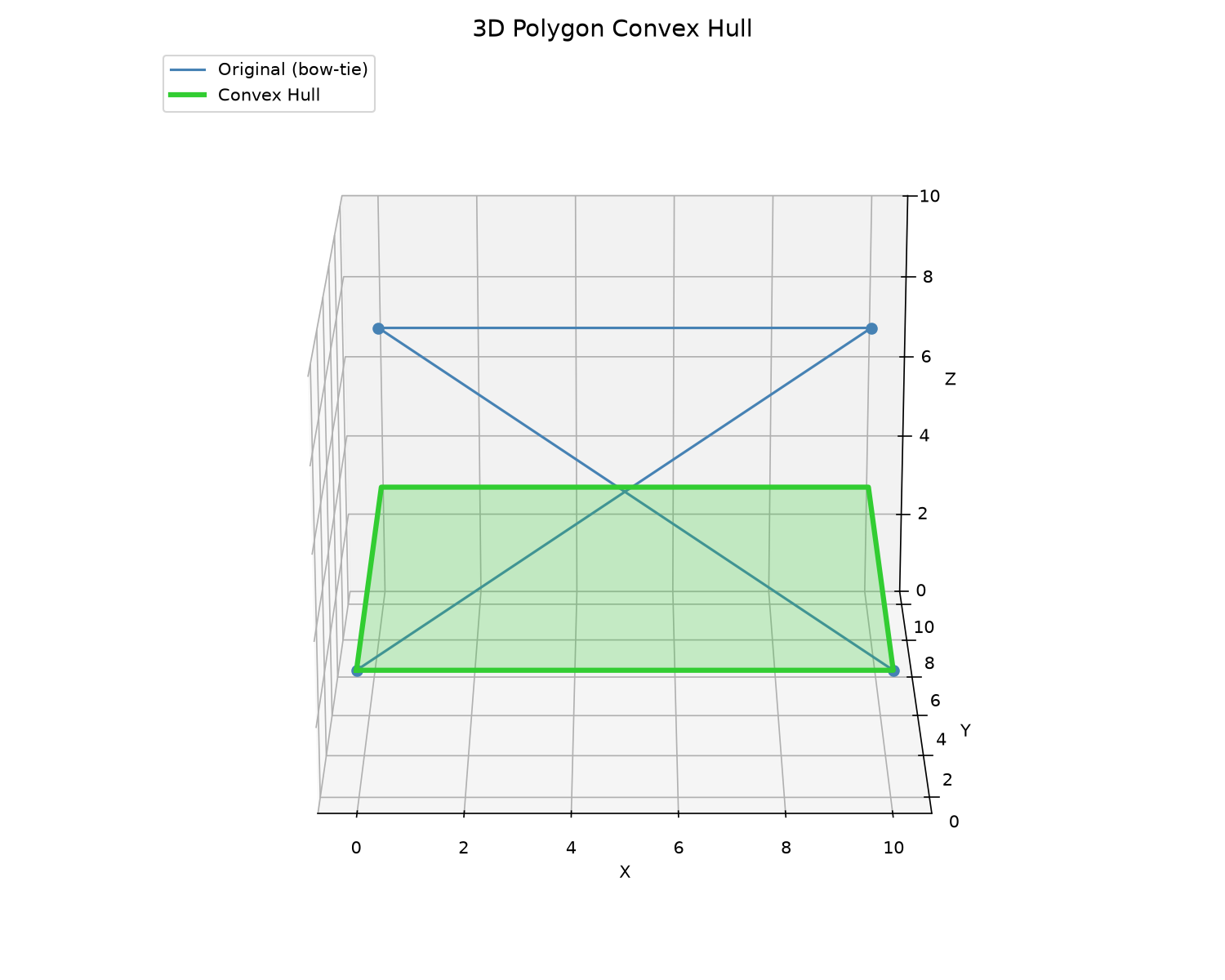
3D convex hull (XY-plane, Z from first hull vertex)
get_polygon_edges_3d()
get_polygon_edges_3d(
polygon: Sequence[types.Point3D],
) -> list[tuple[types.Point3D, types.Point3D]]
Get the edges of a 3D polygon.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | list[tuple[types.Point3D, types.Point3D]] | List of ((x1, y1, z1), (x2, y2, z2)) edges. |
| Complexity | O(n) |
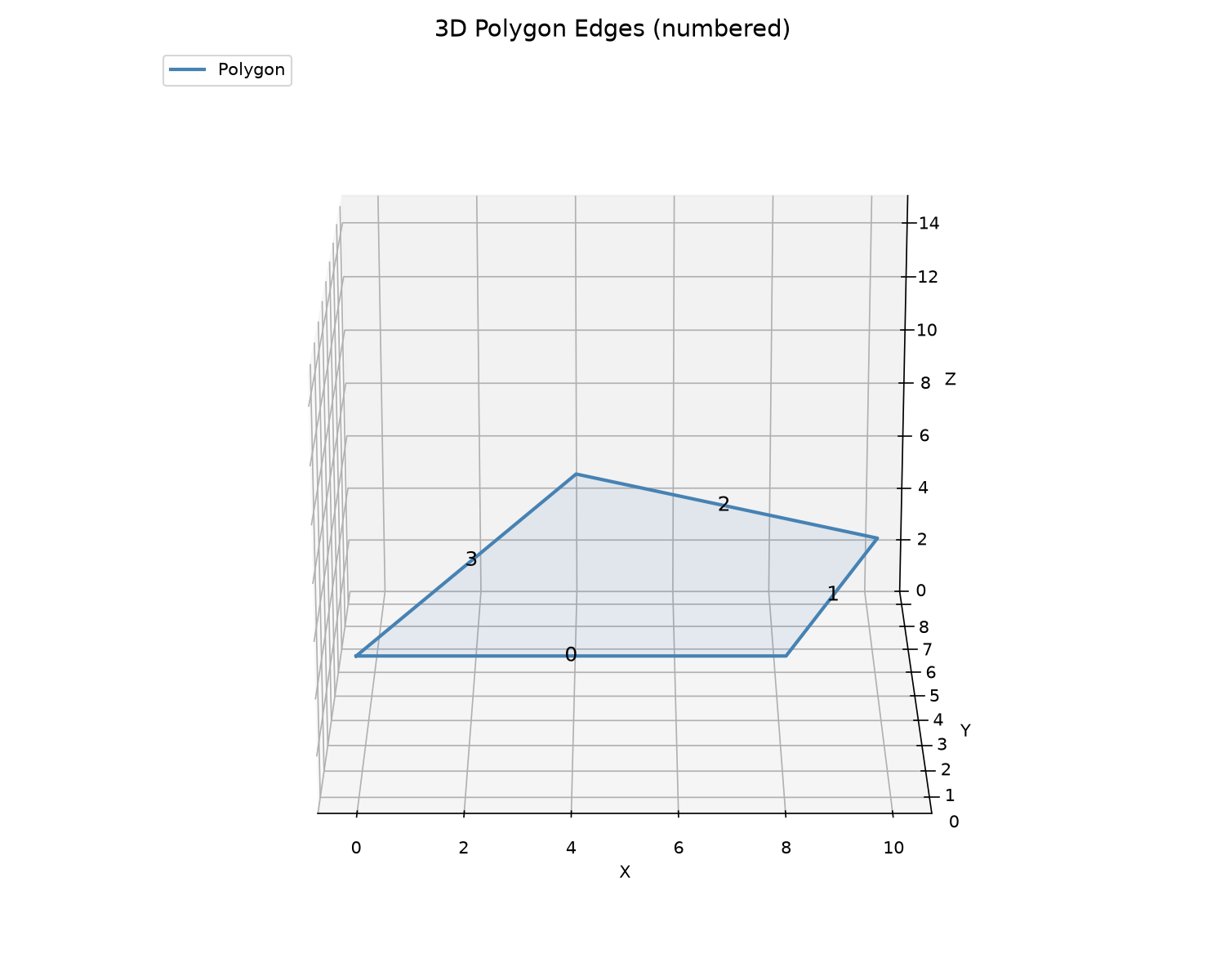
3D polygon edges as (start, end) pairs
get_polygon_group_bounds_3d()
get_polygon_group_bounds_3d(
polygons: Sequence[types.Polygon3D],
) -> types.Rect3D
Get the 3D bounding box of a group of polygons.
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[types.Polygon3D] | List of 3D polygons. |
| Returns | types.Rect3D | Bounding box as (x_min, y_min, x_max, y_max, z_min, z_max). |
| Complexity | O(n * m) |
get_polygon_perimeter_3d()
get_polygon_perimeter_3d(polygon: Sequence[types.Point3D]) -> float
Get the perimeter of a 3D polygon using full 3D edge lengths.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | float | Perimeter length. |
| Complexity | O(n) |
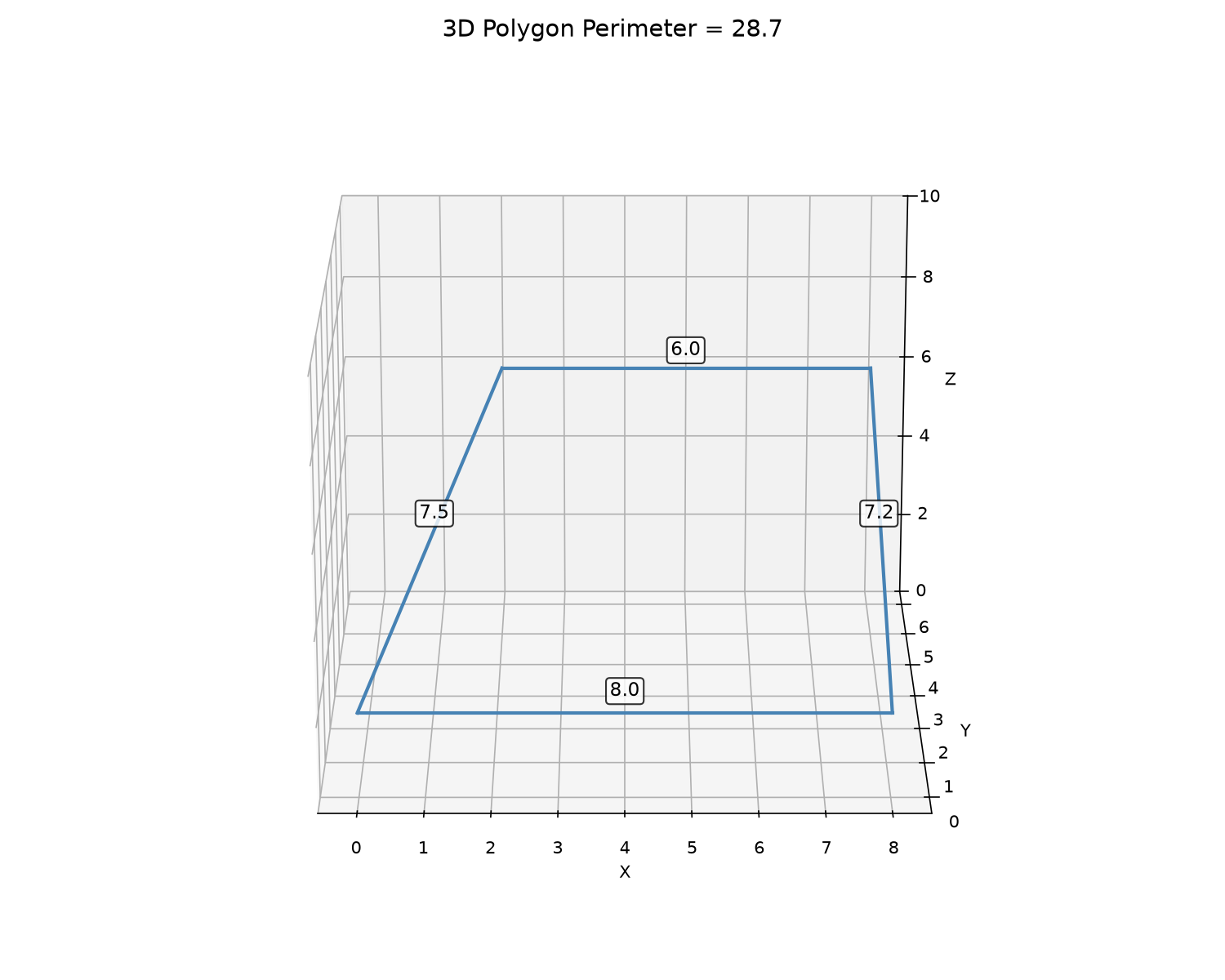
3D polygon perimeter using full 3D edge lengths
get_polygon_signed_area_3d()
get_polygon_signed_area_3d(polygon: Sequence[types.Point3D]) -> float
Signed XY-projected area of a 3D polygon (shoelace formula).
Positive for CCW winding, negative for CW.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
| Returns | float | Signed XY-projected area. |
| Complexity | O(n) |
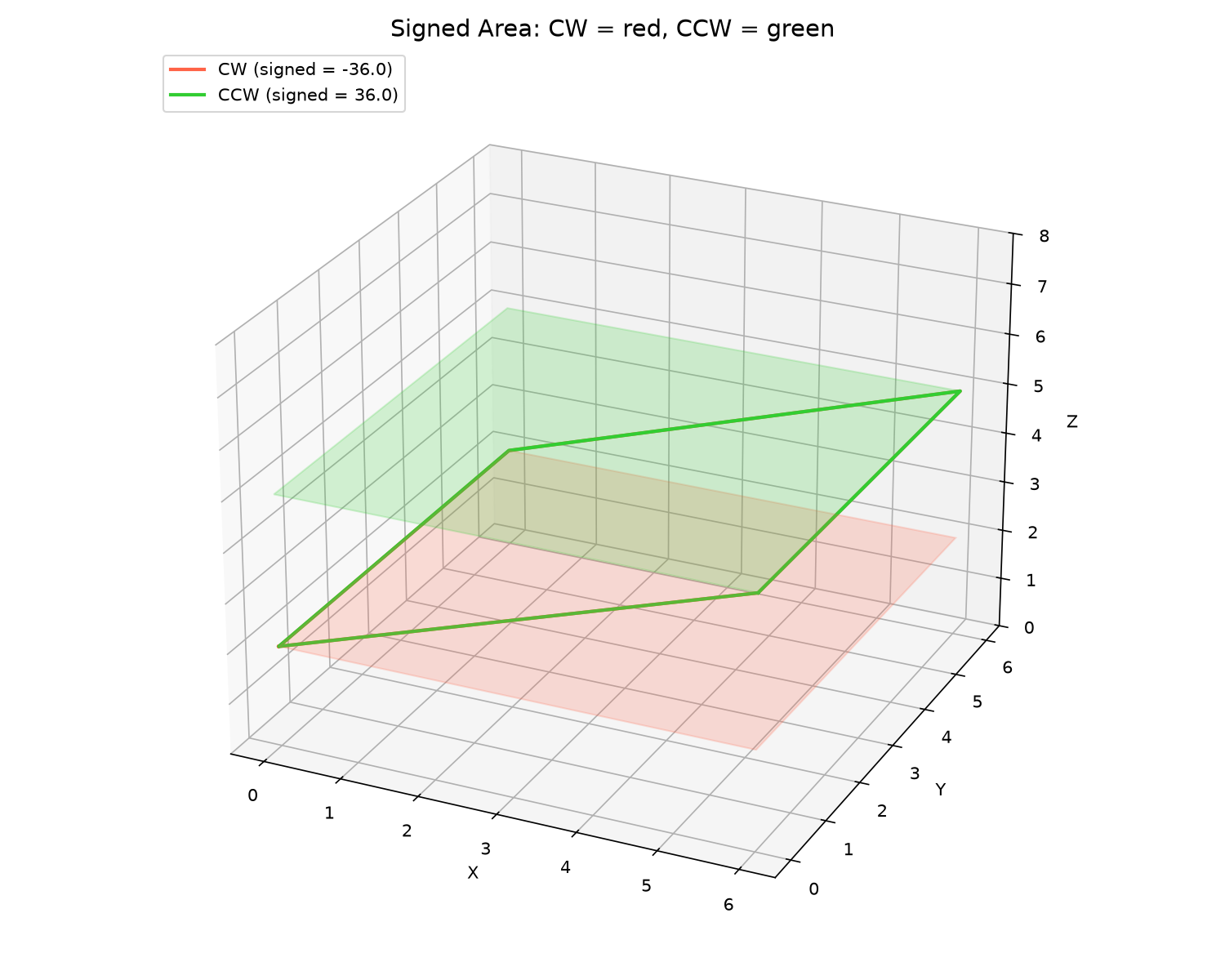
Signed XY-projected area — positive = CCW, negative = CW
get_polygons_closest_point_3d()
get_polygons_closest_point_3d(
polygons: Sequence[types.Polygon3D],
x: float,
y: float,
z: float,
) -> tuple[int, float, tuple[float, float, float], float] | None
Find the closest point on any 3D polygon in a list to (x, y, z).
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[types.Polygon3D] | List of 3D polygons as (x, y, z) points. |
x | float | X coordinate. |
y | float | Y coordinate. |
z | float | Z coordinate. |
| Returns | tuple[int, float, tuple[float, float, float], float] | None | (polygon_index, t, (cx, cy, cz), distance_squared) or None. |
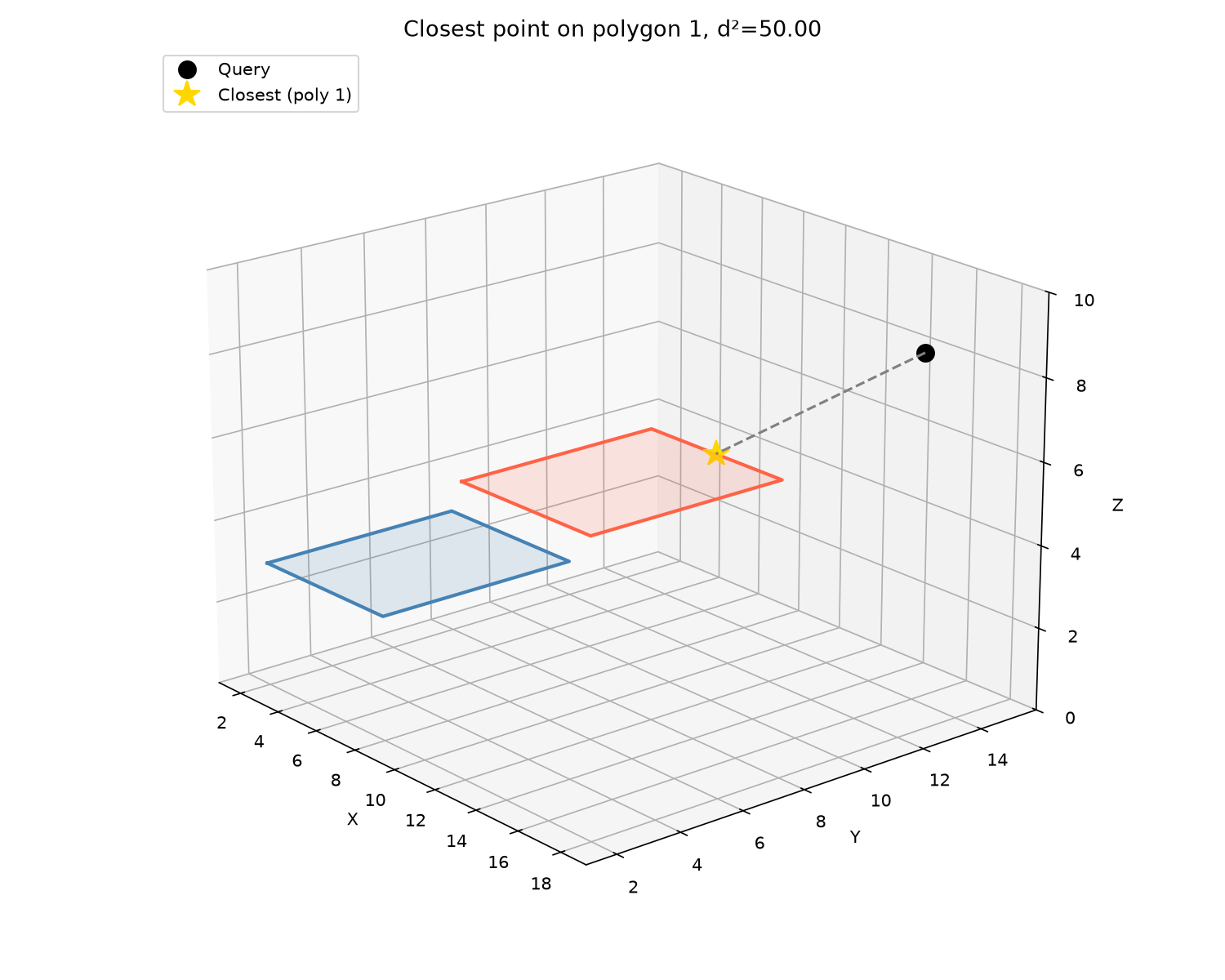
Closest point on multiple 3D polygons
get_polygons_difference_3d()
get_polygons_difference_3d(
poly1: Sequence[types.Point3D],
poly2: Sequence[types.Point3D],
) -> list[types.Polygon3D]
Compute the difference of two 3D polygons (poly1 - poly2).
| Parameter | Type | Description |
|---|---|---|
poly1 | Sequence[types.Point3D] | Subject 3D polygon. |
poly2 | Sequence[types.Point3D] | Clip 3D polygon. |
| Returns | list[types.Polygon3D] | Difference result with Z from first polygon. |
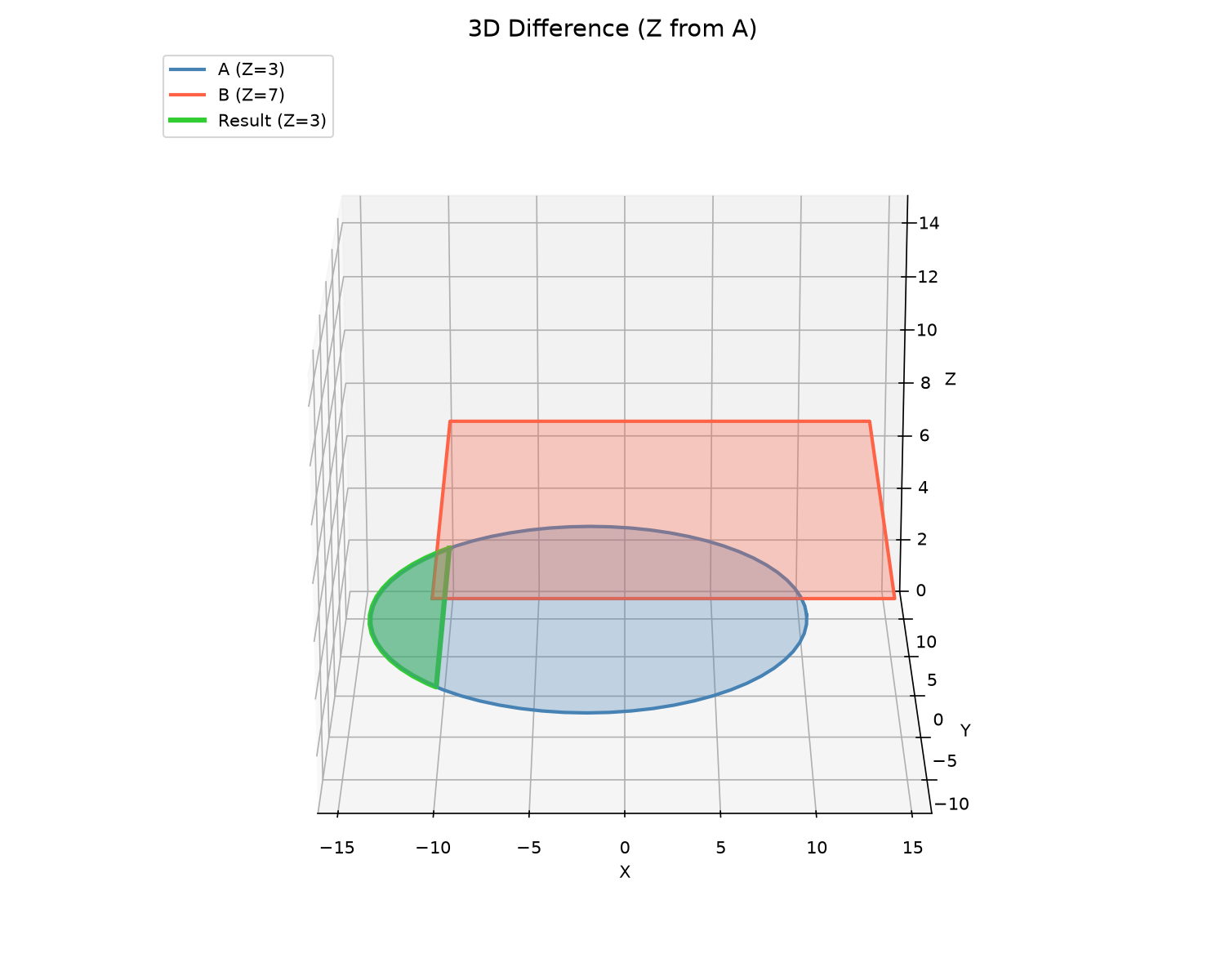
3D polygon difference (A - B) — Z from A
get_polygons_group_difference_3d()
get_polygons_group_difference_3d(
subject: Sequence[types.Polygon3D],
clip: Sequence[types.Polygon3D],
) -> list[types.Polygon3D]
Group difference of 3D polygons (subject - clip).
| Parameter | Type | Description |
|---|---|---|
subject | Sequence[types.Polygon3D] | Subject group of 3D polygons. |
clip | Sequence[types.Polygon3D] | Clip group of 3D polygons. |
| Returns | list[types.Polygon3D] | Difference result with Z from first subject polygon. |
get_polygons_group_intersection_3d()
get_polygons_group_intersection_3d(
subject: Sequence[types.Polygon3D],
clip: Sequence[types.Polygon3D],
) -> list[types.Polygon3D]
Group intersection of 3D polygons (subject ∩ clip).
| Parameter | Type | Description |
|---|---|---|
subject | Sequence[types.Polygon3D] | Subject group of 3D polygons. |
clip | Sequence[types.Polygon3D] | Clip group of 3D polygons. |
| Returns | list[types.Polygon3D] | Intersection result with Z from first subject polygon. |
get_polygons_intersection_3d()
get_polygons_intersection_3d(
poly1: Sequence[types.Point3D],
poly2: Sequence[types.Point3D],
) -> list[types.Polygon3D]
Compute the intersection of two 3D polygons (XY-plane, Z preserved).
| Parameter | Type | Description |
|---|---|---|
poly1 | Sequence[types.Point3D] | First 3D polygon. |
poly2 | Sequence[types.Point3D] | Second 3D polygon. |
| Returns | list[types.Polygon3D] | Intersection result with Z from first polygon. |
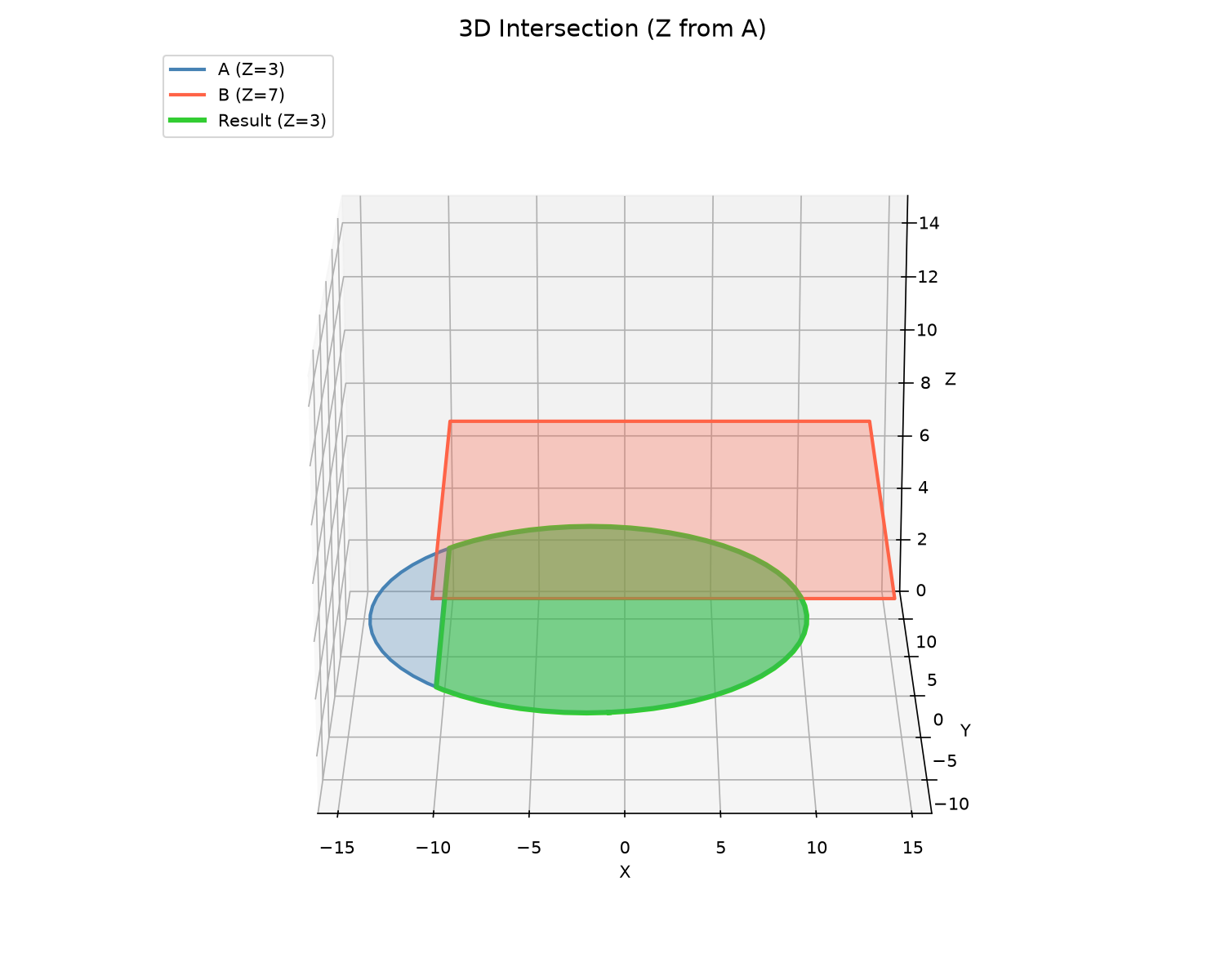
3D polygon intersection — Z from first polygon
get_polygons_union_3d()
get_polygons_union_3d(
polygons: Sequence[types.Polygon3D],
) -> list[types.Polygon3D]
Compute the union of 3D polygons (XY-plane, Z preserved).
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[types.Polygon3D] | List of 3D polygons. |
| Returns | list[types.Polygon3D] | Union result with Z from first polygon. |
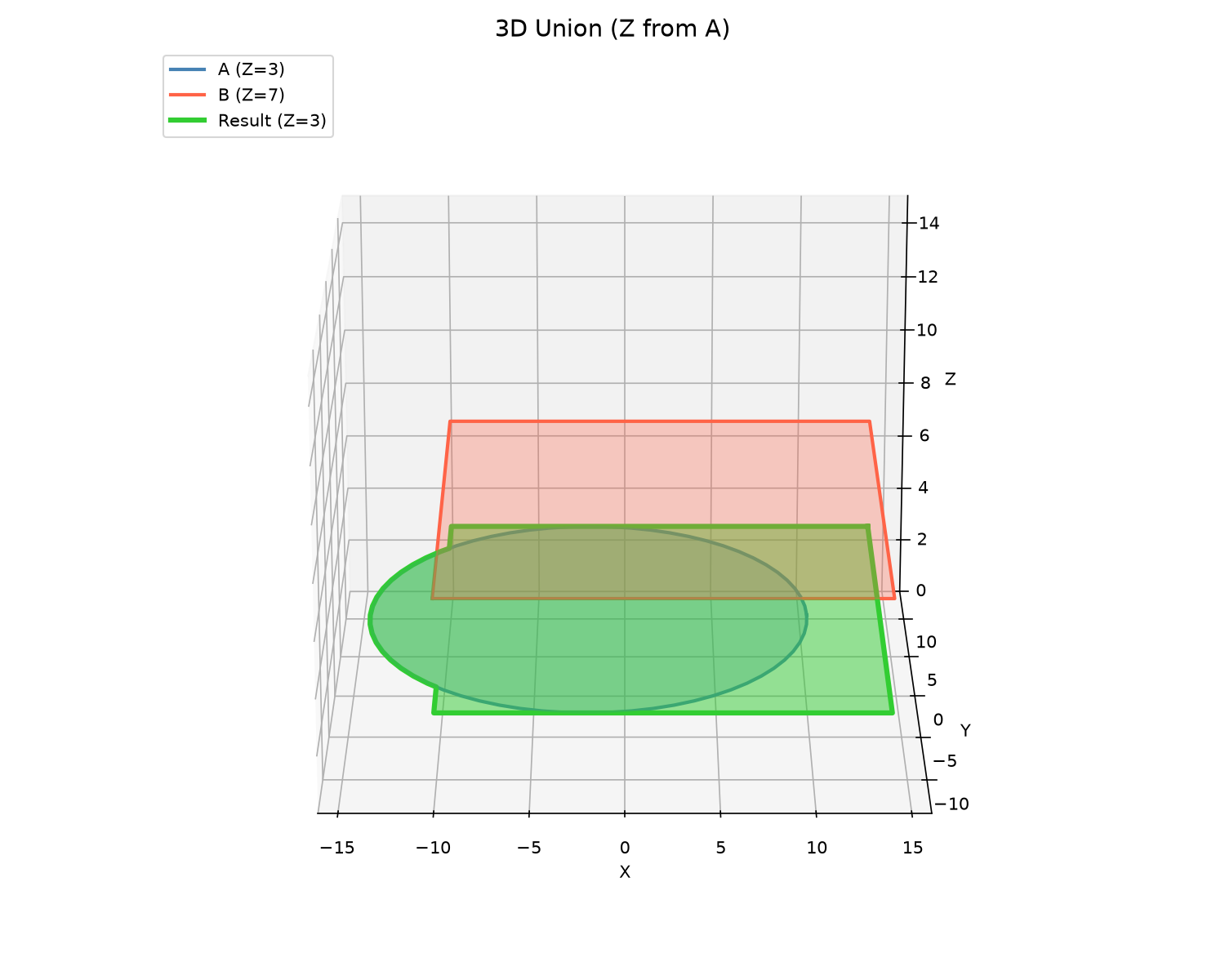
3D polygon union — Z from first polygon
get_polyline_end_tangent_3d()
get_polyline_end_tangent_3d(polyline: Sequence[types.Point3D]) -> types.Point
Normalised tangent direction at the last point of a 3D polyline.
Returns the normalised XY direction from the second-to-last point to the last point. Falls back to
(1.0, 0.0) when the polyline has fewer than 2 points or the last edge has zero length.
| Parameter | Type | Description |
|---|---|---|
polyline | Sequence[types.Point3D] | Polyline as (x, y, z) points. |
| Returns | types.Point | Normalised (dx, dy) tangent direction. |
| Complexity | O(1) |
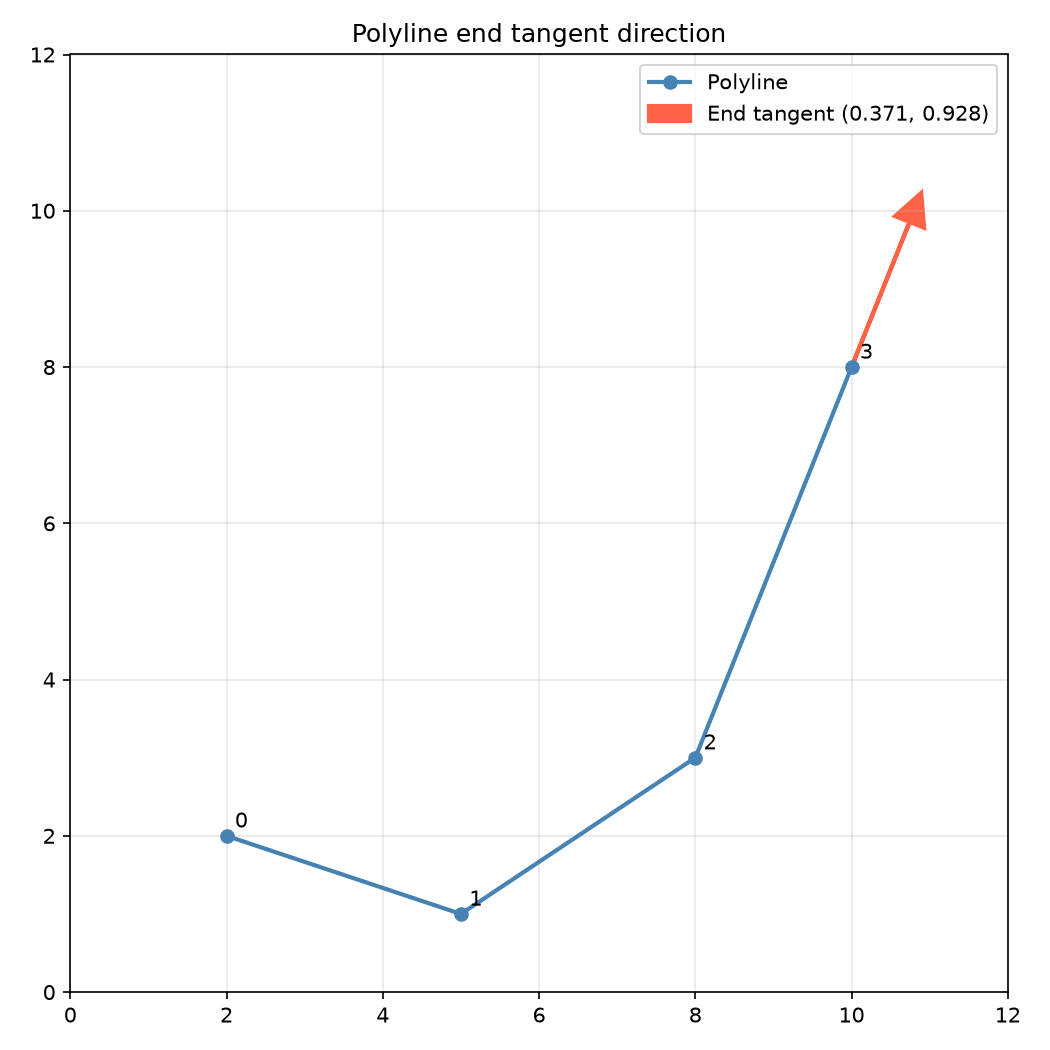
Normalised end tangent direction of a 3D polyline
offset_polygon_3d()
offset_polygon_3d(
polygon: Sequence[types.Point3D],
offset: float,
) -> list[types.Polygon3D]
Offset (inflate/deflate) a closed 3D polygon.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Input 3D polygon. |
offset | float | Offset distance (positive = grow, negative = shrink). |
| Returns | list[types.Polygon3D] | Offset polygons with Z from input. |
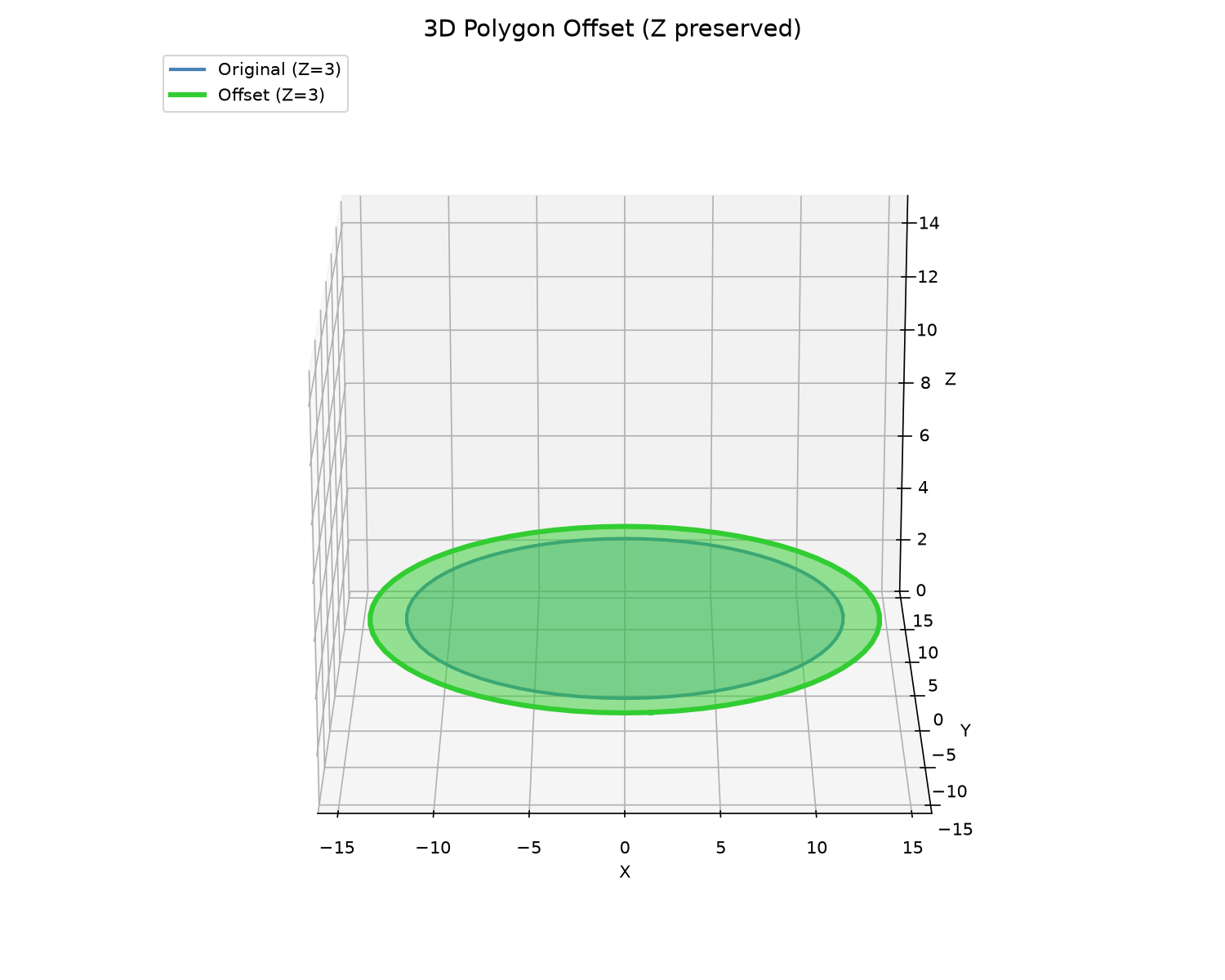
3D polygon offset — Z preserved from input
offset_polyline_3d()
offset_polyline_3d(
polyline: Sequence[types.Point3D],
distance: float,
closed: bool = False,
) -> types.Polygon3D
Offset a 3D polyline in true 3D (edge-plane miter).
Unlike offset_polygon_3d (which projects to XY, offsets, then lifts back), this function offsets each vertex in the local plane of its two adjacent edges. This gives a true 3D offset suitable for non-planar polylines.
Positive distance offsets to the left of the traversal direction.
| Parameter | Type | Description |
|---|---|---|
polyline | Sequence[types.Point3D] | Input 3D vertices as (x, y, z) points. |
distance | float | Offset distance (positive = left, negative = right). |
closed | bool = False | When True, the polyline is treated as a closed ring (last vertex connects back to first). When False (default), the first and last vertices are offset perpendicular to their single edge. |
| Returns | types.Polygon3D | Offset polyline with the same number of vertices. |
| Complexity | O(n) |
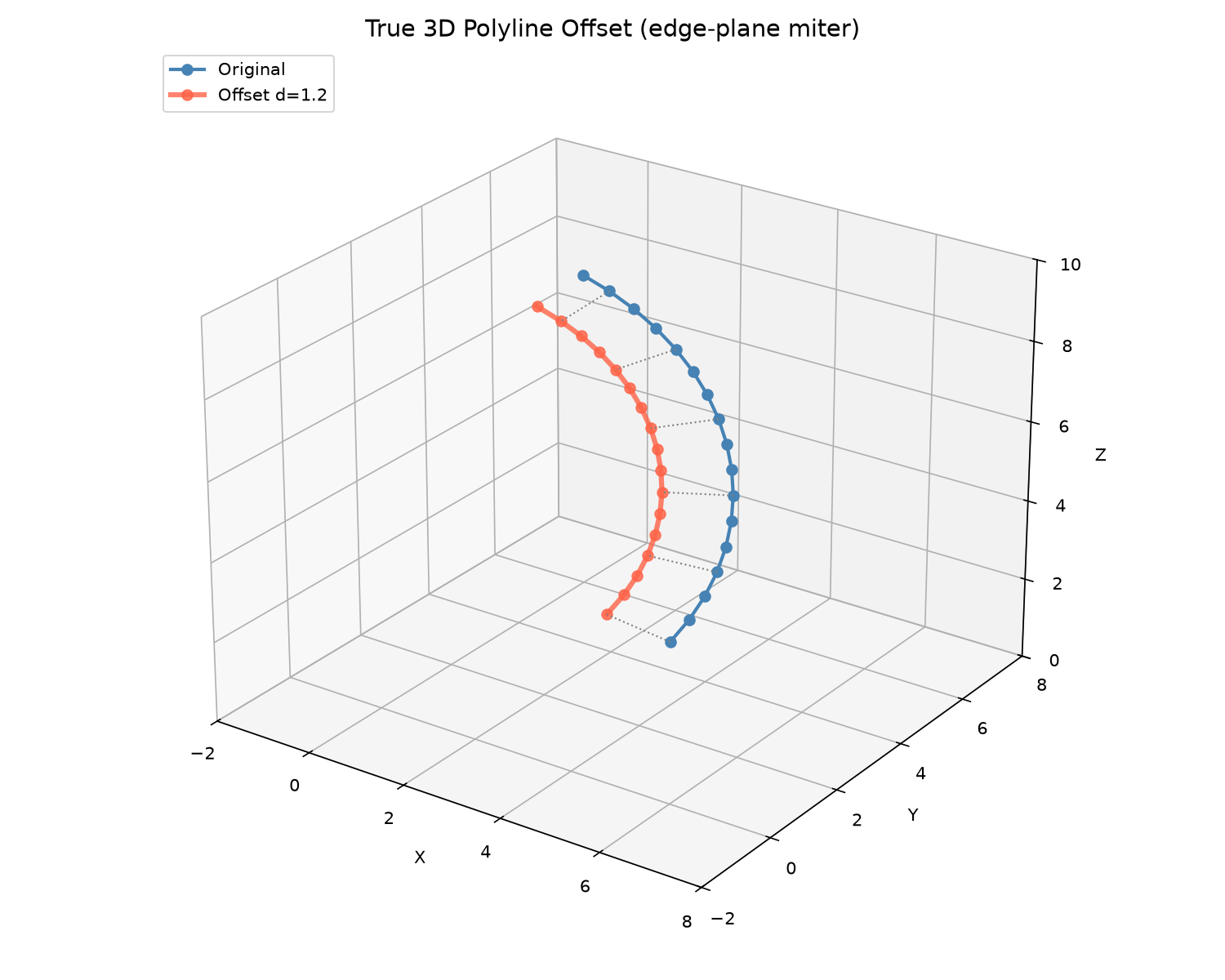
True 3D polyline offset (edge-plane miter)
resample_polyline_3d()
resample_polyline_3d(
points: Sequence[types.Point3D],
max_segment_length: float,
is_closed: bool,
) -> list[types.Point3D]
Resample a 3D polyline with a maximum segment length.
| Parameter | Type | Description |
|---|---|---|
points | Sequence[types.Point3D] | Sequence of 3D points. |
max_segment_length | float | Maximum allowed segment length. |
is_closed | bool | Whether the polyline is closed. |
| Returns | list[types.Point3D] | Resampled 3D points. |
| Complexity | O(n) time, O(n) space |
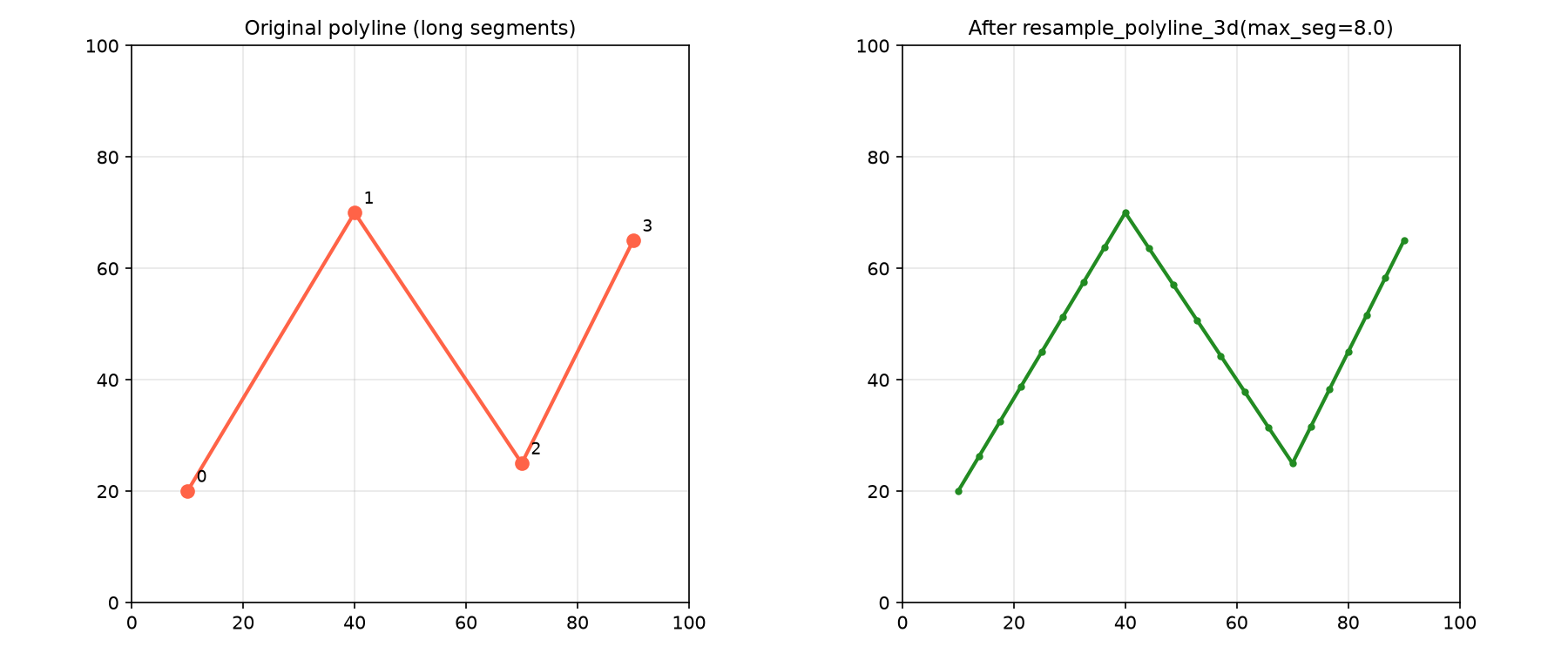
Resample a 3D polyline with a max segment length
rotate_polygon_3d()
rotate_polygon_3d(
polygon: Sequence[types.Point3D],
angle: float,
) -> types.Polygon3D
Rotate a 3D polygon around the Z axis (XY rotation, Z preserved).
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
angle | float | Rotation angle in degrees. |
| Returns | types.Polygon3D | Rotated polygon. |
| Complexity | O(n) |
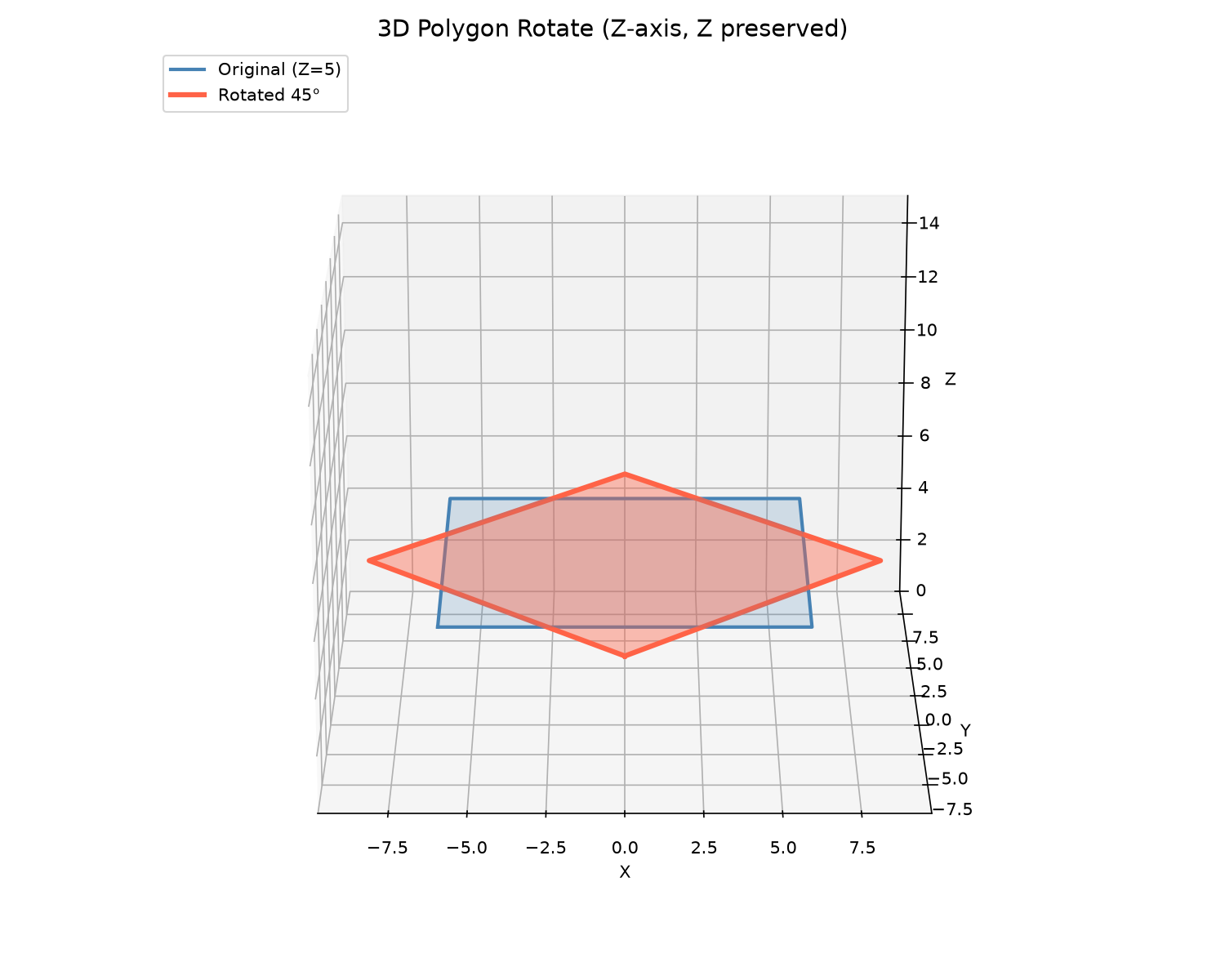
3D polygon rotated around Z axis (Z preserved)
rotate_polygons_3d()
rotate_polygons_3d(
polygons: Sequence[types.Polygon3D],
angle: float,
) -> list[types.Polygon3D]
Rotate multiple 3D polygons around the Z axis.
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[types.Polygon3D] | List of 3D polygons. |
angle | float | Rotation angle in degrees. |
| Returns | list[types.Polygon3D] | Rotated polygons. |
| Complexity | O(n * m) |
scale_polygon_3d()
scale_polygon_3d(
polygon: Sequence[types.Point3D],
scale: float,
scale_y: Optional[float] = None,
scale_z: Optional[float] = None,
) -> types.Polygon3D
Scale a 3D polygon.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
scale | float | X (and Y/Z if scale_y/scale_z are None) scale factor. |
scale_y | Optional[float] = None | Y scale factor (optional). |
scale_z | Optional[float] = None | Z scale factor (optional). |
| Returns | types.Polygon3D | Scaled polygon. |
| Complexity | O(n) |
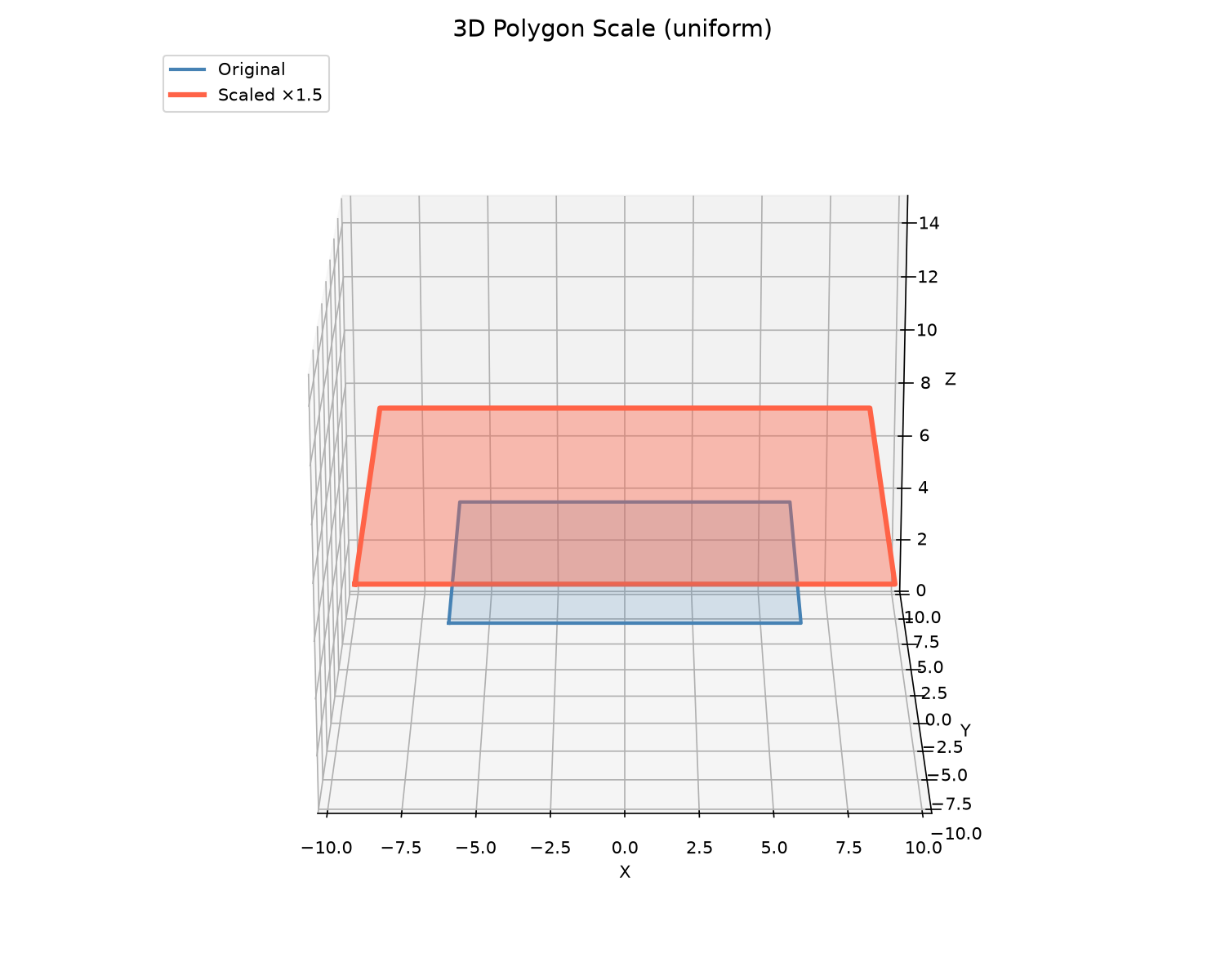
3D polygon scaled uniformly
translate_polygon_3d()
translate_polygon_3d(
polygon: Sequence[types.Point3D],
dx: float,
dy: float,
dz: float = 0,
) -> types.Polygon3D
Translate a 3D polygon.
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Polygon as (x, y, z) points. |
dx | float | X translation. |
dy | float | Y translation. |
dz | float = 0 | Z translation. |
| Returns | types.Polygon3D | Translated polygon. |
| Complexity | O(n) |
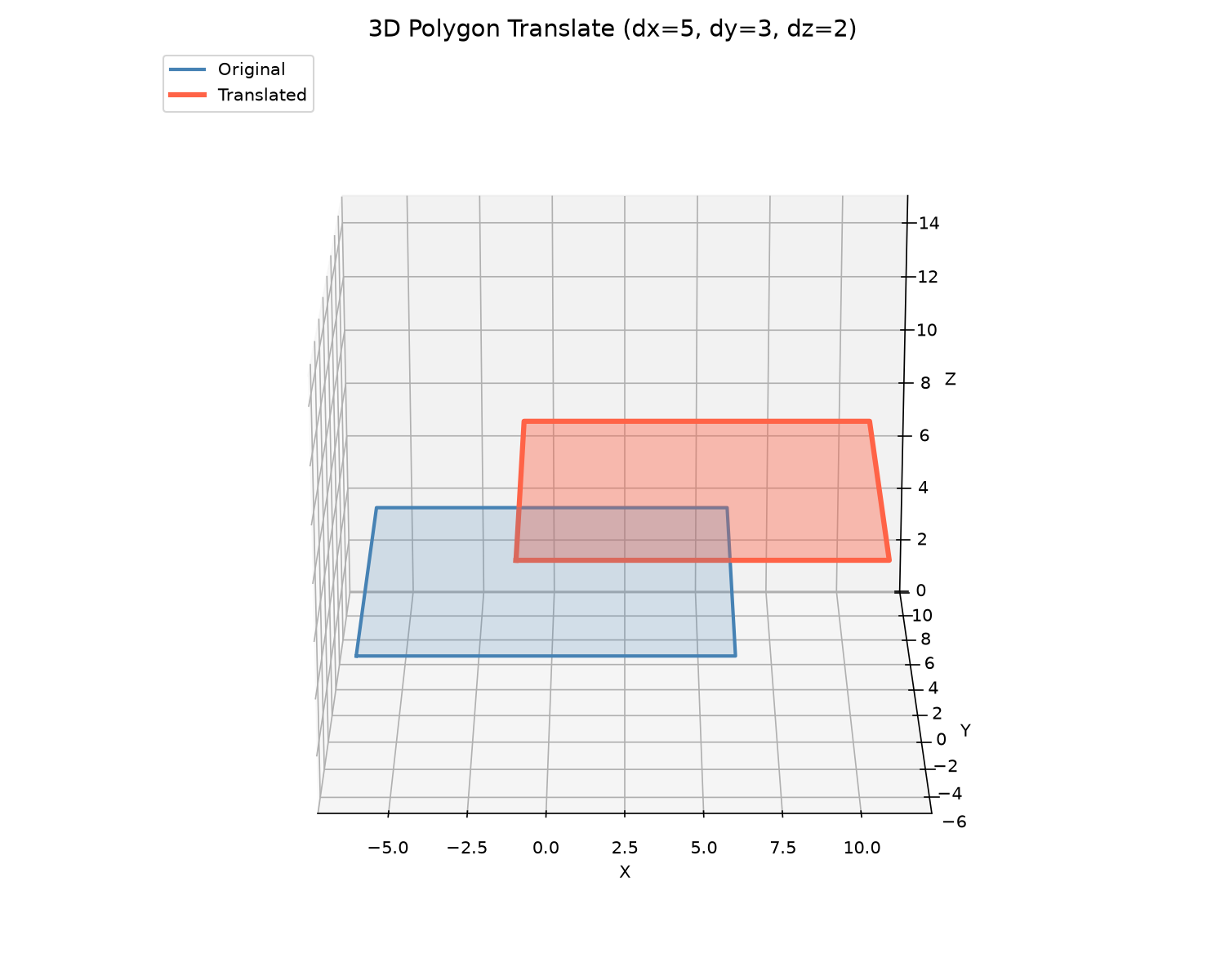
3D polygon translated by dx, dy, dz
translate_polygons_3d()
translate_polygons_3d(
polygons: Sequence[types.Polygon3D],
dx: float,
dy: float,
dz: float = 0,
) -> list[types.Polygon3D]
Translate a list of 3D polygons.
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[types.Polygon3D] | List of 3D polygons. |
dx | float | X translation. |
dy | float | Y translation. |
dz | float = 0 | Z translation. |
| Returns | list[types.Polygon3D] | Translated polygons. |
| Complexity | O(n * m) |
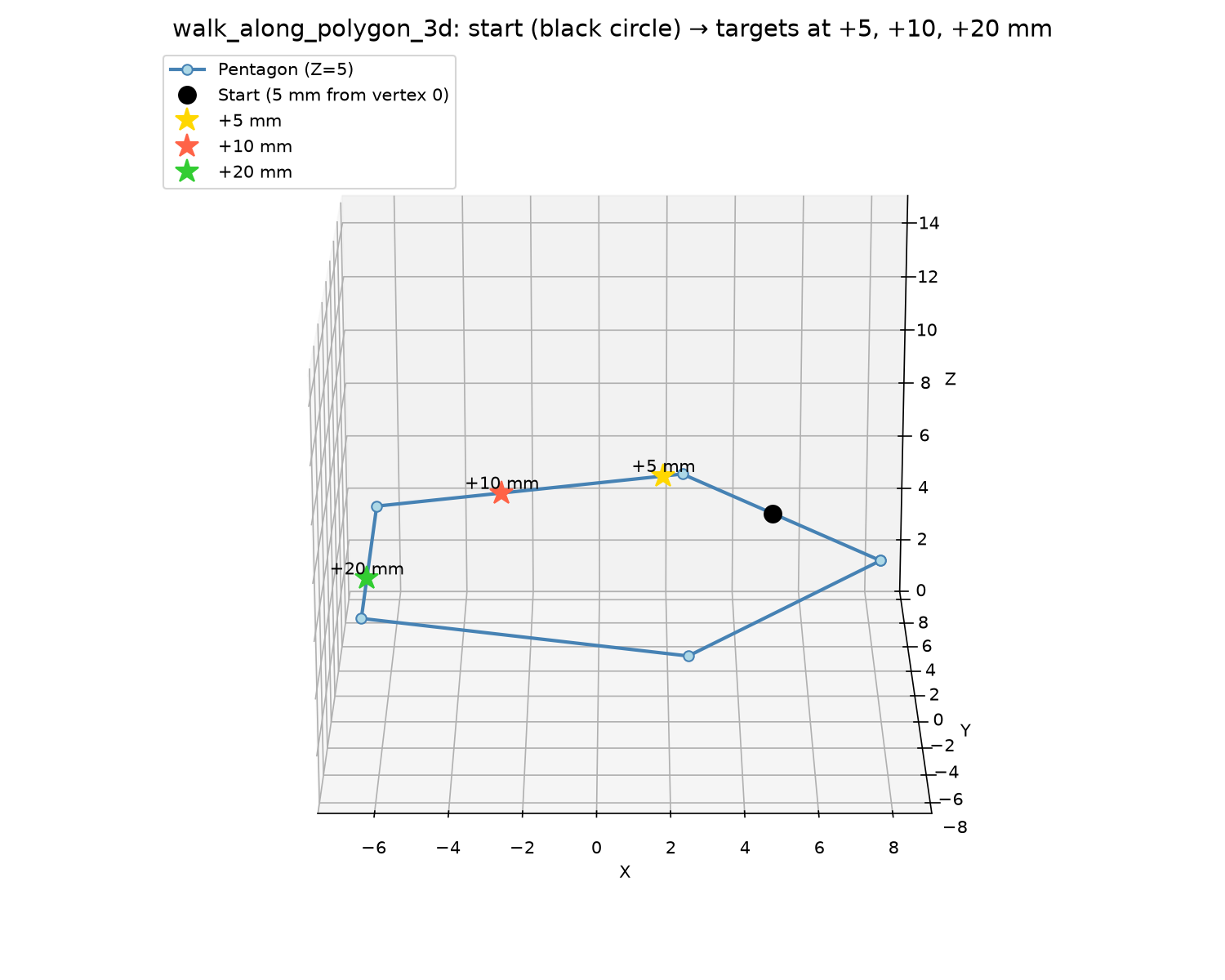
walk_along_polygon_3d()
walk_along_polygon_3d(
polygon: Sequence[types.Point3D],
start: tuple[float, float, float],
forward: bool,
distance: float,
) -> types.Point3D
Walk along a closed 3D polygon by a given arc length from a starting point.
Given a closed polygon and a starting point on it, walk along the polygon edges and return the point
at exactly distance units away. The walk wraps around the polygon (unlike
walk_along_polyline_3d which clamps at endpoints).
| Parameter | Type | Description |
|---|---|---|
polygon | Sequence[types.Point3D] | Closed polygon as (x, y, z) points. |
start | tuple[float, float, float] | Starting point on the polygon. |
forward | bool | Walk forward (along vertex order) if True, backward if False. |
distance | float | Arc length to walk. |
| Returns | types.Point3D | Point (x, y, z) at the given distance. |
| Complexity | O(n) |
Walk along a closed 3D polygon (wraps around)
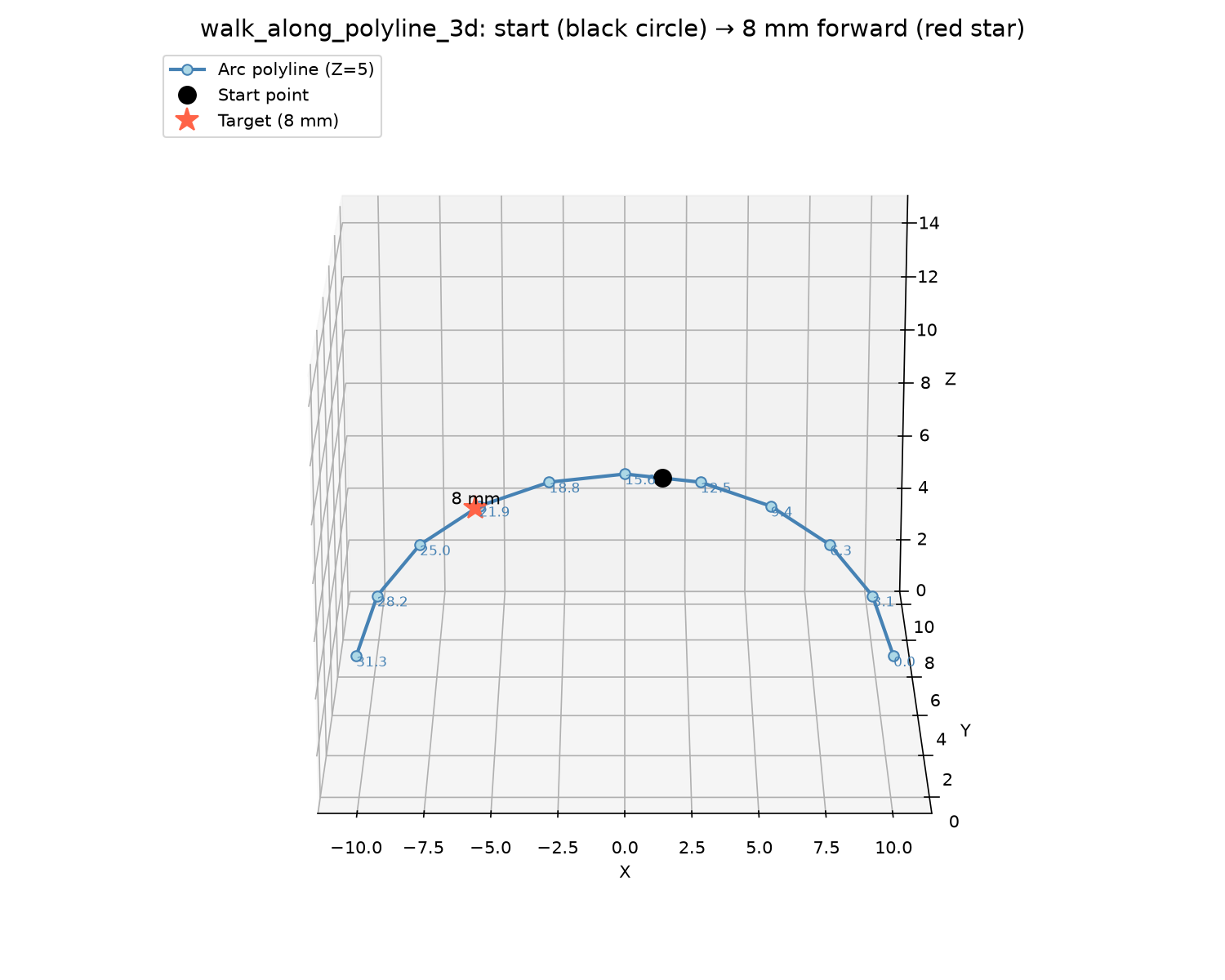
walk_along_polyline_3d()
walk_along_polyline_3d(
polyline: Sequence[types.Point3D],
start: tuple[float, float, float],
forward: bool,
distance: float,
) -> types.Point3D
Walk along an open 3D polyline by a given arc length from a starting point.
Given an open polyline and a starting point on it, walk along the polyline segments and return the
point at exactly distance units away. Clamps to the nearest endpoint when the walk would exceed
it.
| Parameter | Type | Description |
|---|---|---|
polyline | Sequence[types.Point3D] | Open polyline as (x, y, z) points. |
start | tuple[float, float, float] | Starting point on the polyline. |
forward | bool | Walk forward (along vertex order) if True, backward if False. |
distance | float | Arc length to walk. |
| Returns | types.Point3D | Point (x, y, z) at the given distance. |
| Complexity | O(n) |
Walk along a 3D polyline by a given arc length