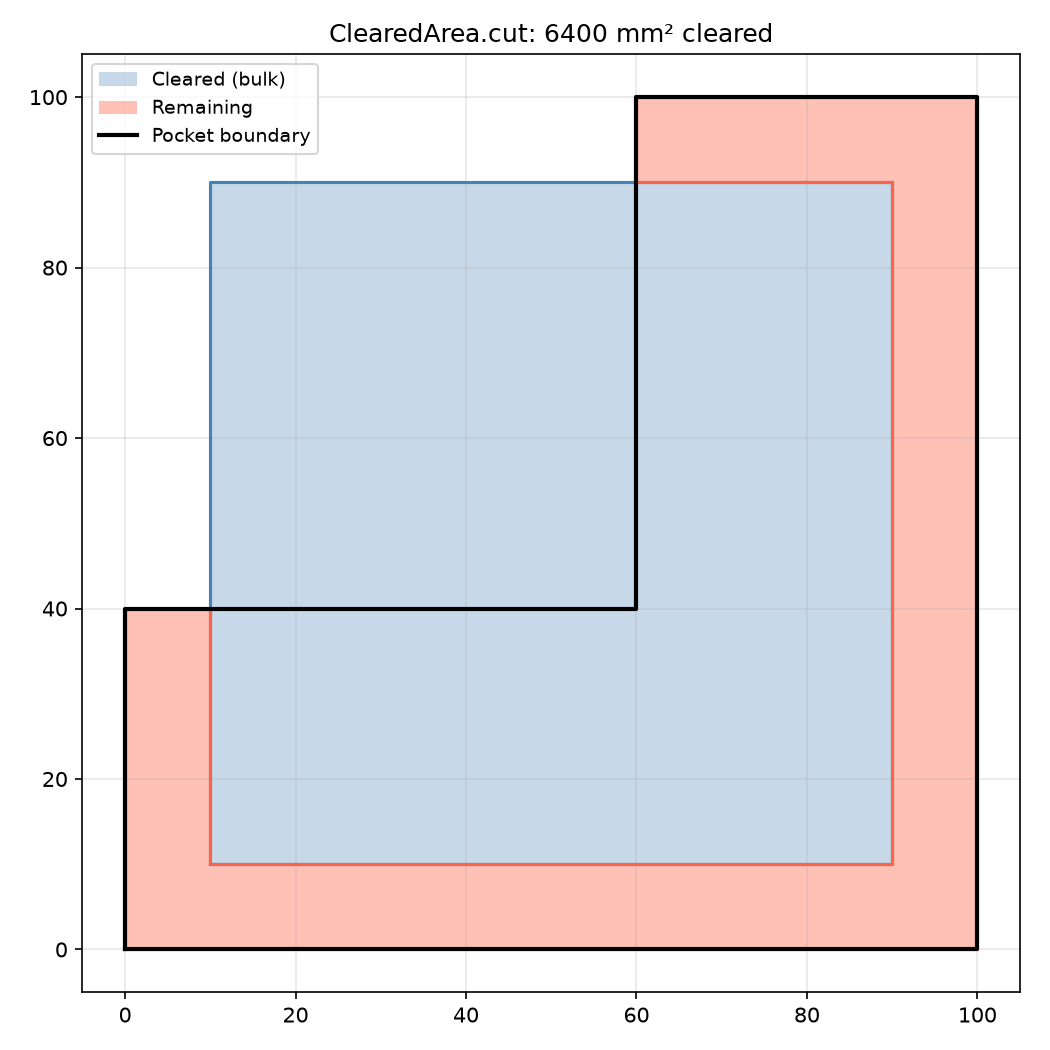
raygeo.ops.cut.cleared_area
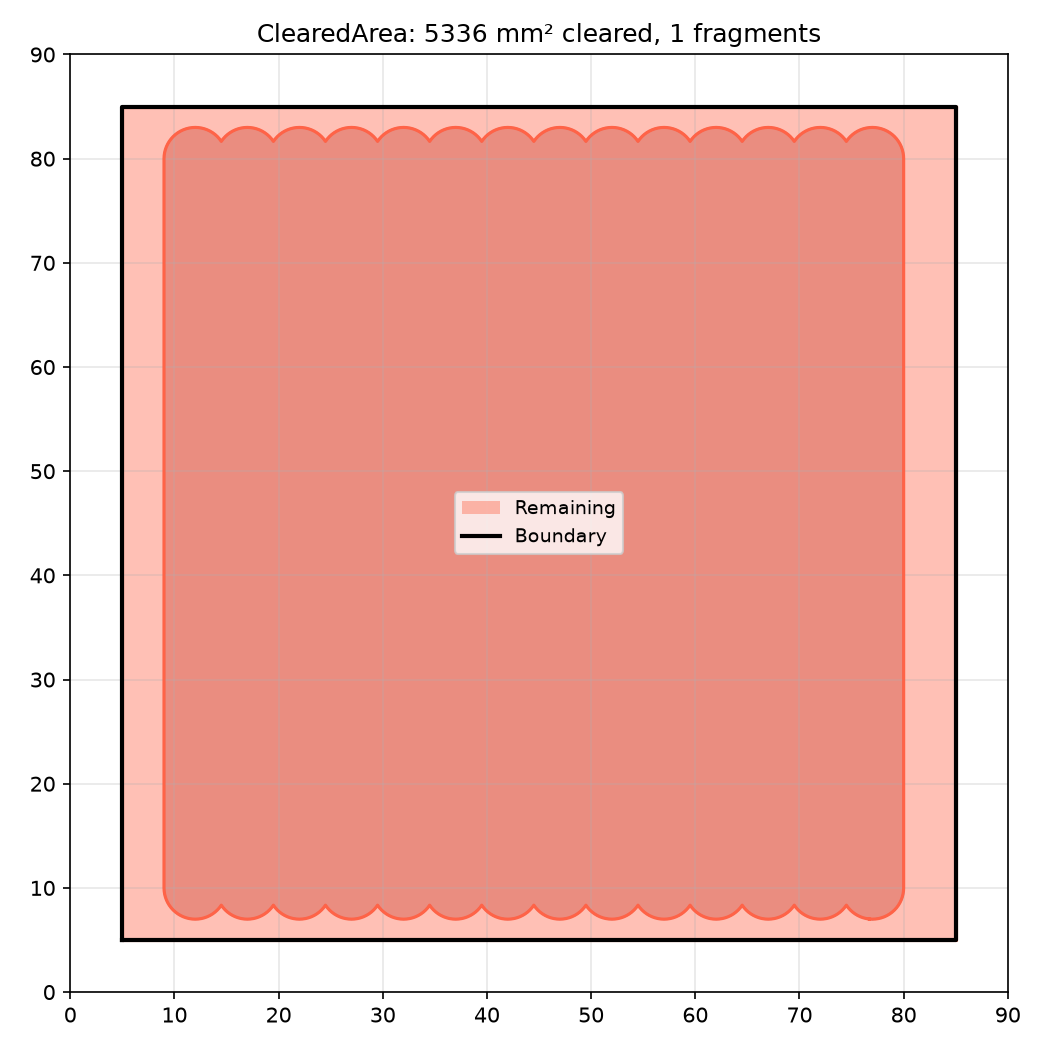
ClearedArea tracking a simulated raster toolpath — cleared fragments shown in blue, remaining area in red
ClearedArea
angular_engagement()
angular_engagement(center: tuple[float, float], radius: float) -> float
Compute angular engagement by exact circle–polygon intersection.
Creates a disk polygon at center with radius, intersects it with all nearby cleared fragments,
and returns the uncleared angular extent in [0, 2π].
| Parameter | Type | Description |
|---|---|---|
center | tuple[float, float] | Query point (x, y). |
radius | float | Disk radius (mm). |
| Returns | float | Uncleared angular extent (radians). |
begin_batch()
begin_batch() -> None
Begin buffering single‑segment expansions.
Subsequent calls to expand_batched are queued without a union. Call commit_batch to union all
queued sweeps with the stored fragments in a single pass.
Calling this while a batch is already active is a no‑op.
| Parameter | Type | Description |
|---|---|---|
| Returns | None |
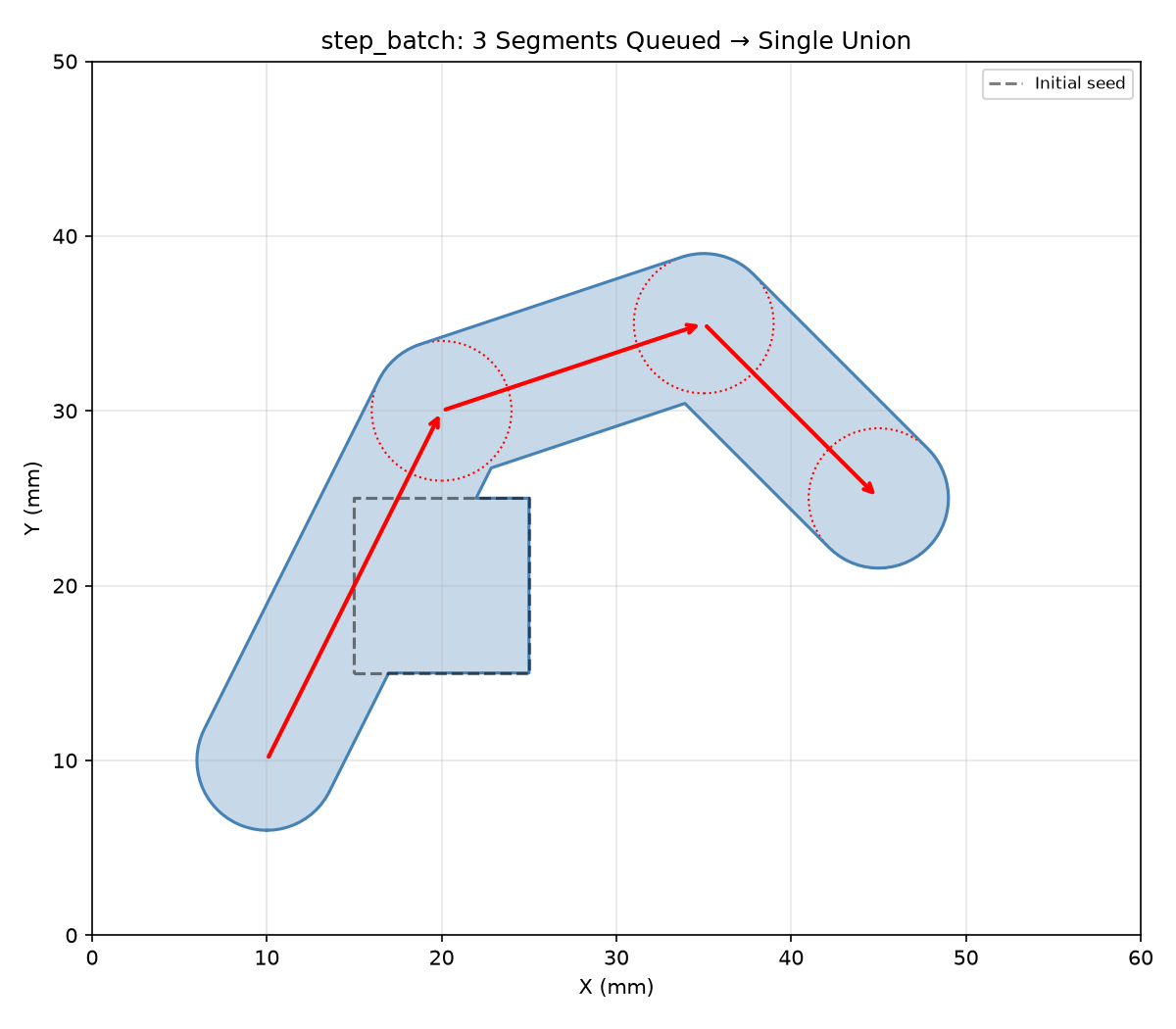
Three segments queued via begin_batch / expand_batched then unioned in a single commit_batch
pass.
bites()
bites(
step_over: float,
tool_radius: float,
simplify_tol: float,
) -> list[list[tuple[float, float]]]
Compute the "bites" — new material reachable by expanding the current frontier outward by step_over, clipping to the tool-centre envelope, and subtracting already-cleared portions.
| Parameter | Type | Description |
|---|---|---|
step_over | float | Lateral step-over in mm. |
tool_radius | float | Tool radius (mm) for computing the envelope. |
simplify_tol | float | Tolerance in mm for frontier simplification. |
| Returns | list[list[tuple[float, float]]] | List of polygons representing the bite regions. |
| Complexity | O(n log n) |
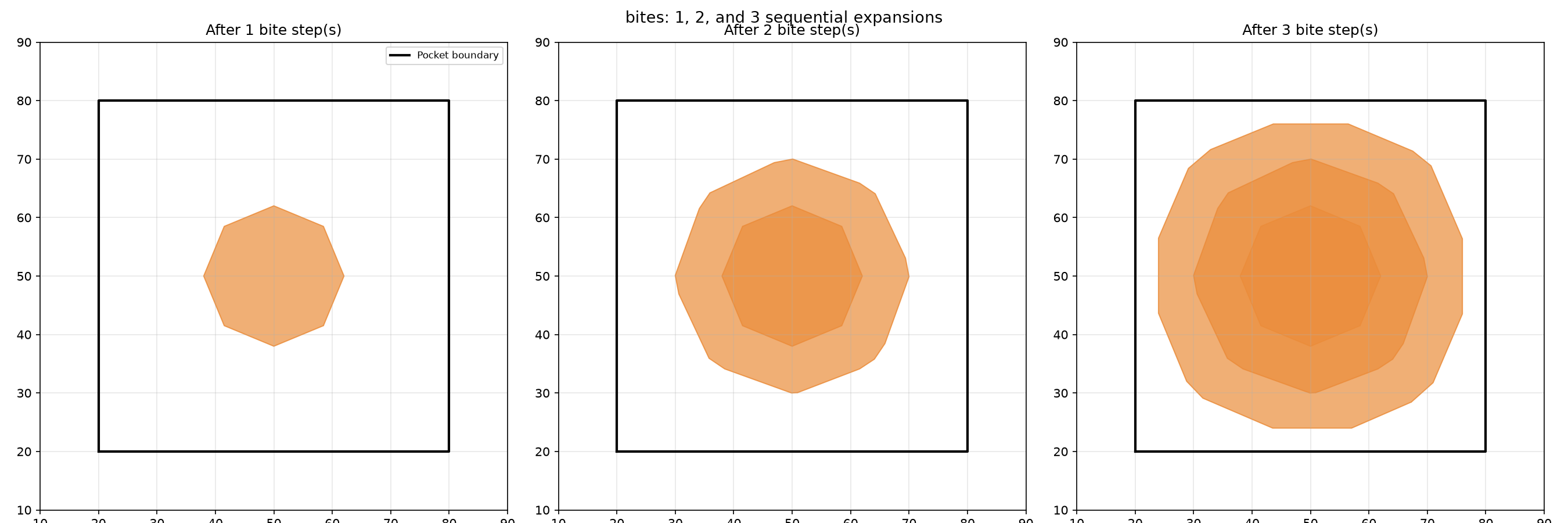
bites computes the expansible material — the crescent-shaped regions of uncut material reachable
by expanding the frontier by step_over.
commit_batch()
commit_batch() -> None
Union all buffered sweeps with stored fragments in a single pass, then rebuild the spatial grid.
After this call the batch is closed (the caller may start a new one).
| Parameter | Type | Description |
|---|---|---|
| Returns | None |
commit_batch_local()
commit_batch_local() -> None
Union only the buffered sweeps with nearby overlapping fragments, using the spatial grid to avoid touching distant fragments.
After this call the batch is closed (the caller may start a new one).
| Parameter | Type | Description |
|---|---|---|
| Returns | None |
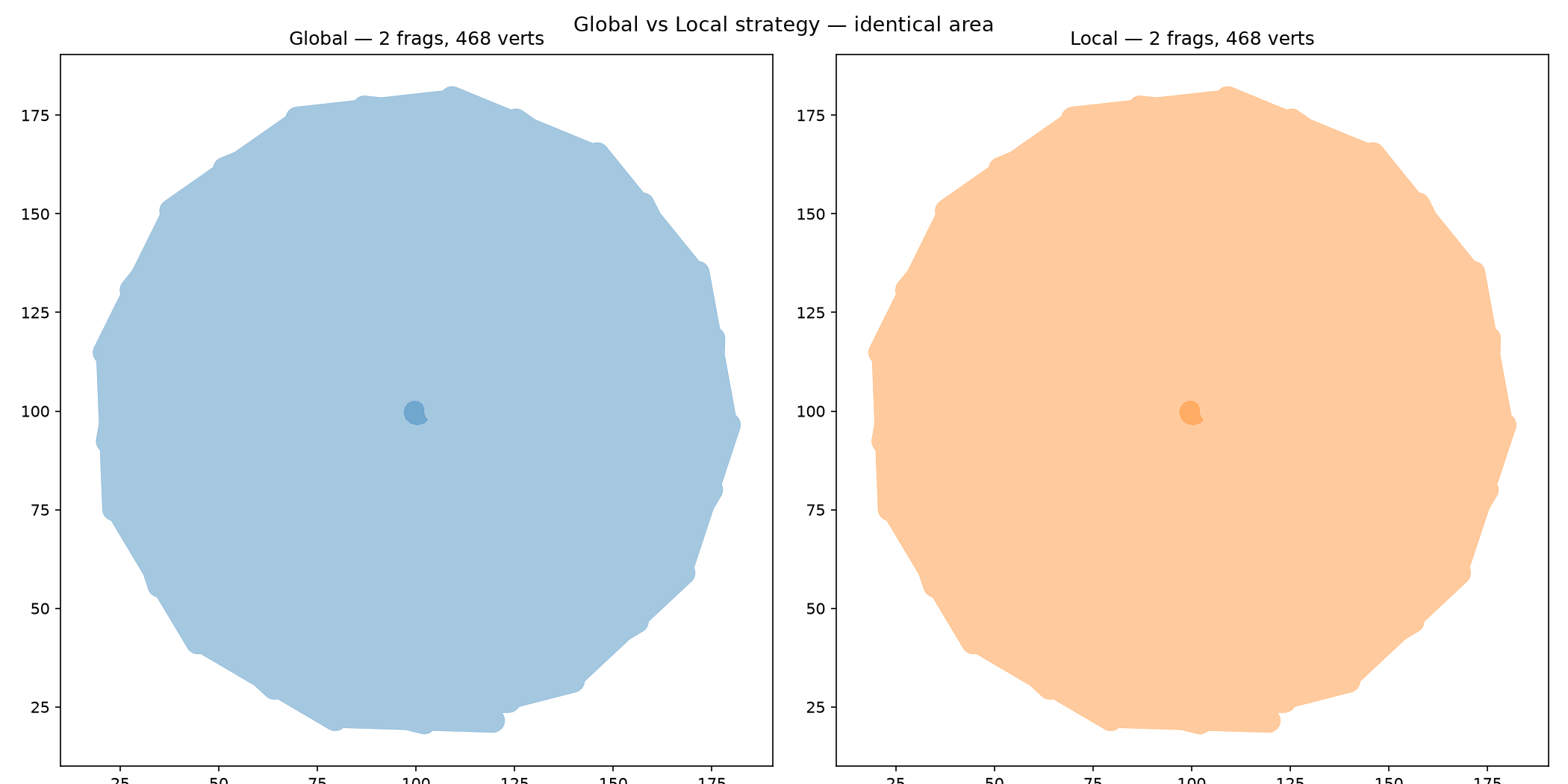
commit_batch (global union) vs commit_batch_local (grid-local merge) — identical cleared area,
but Local updates only the fragments whose bbox overlaps each new swept polygon.
compact_if_needed()
compact_if_needed(tol: float) -> None
Compact fragments if total vertex count exceeds the default threshold.
| Parameter | Type | Description |
|---|---|---|
tol | float | Vertex simplification tolerance in mm. |
| Returns | None |
compact_if_needed_threshold()
compact_if_needed_threshold(tol: float, threshold: int) -> None
Compact with an explicit vertex-count threshold.
| Parameter | Type | Description |
|---|---|---|
tol | float | Vertex simplification tolerance in mm. |
threshold | int | Vertex count threshold above which compaction is triggered. |
| Returns | None |
cut()
cut(polygons: Sequence[Sequence[tuple[float, float]]]) -> None
Add pre‑computed polygons to the cleared set.
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[Sequence[tuple[float, float]]] | List of polygons (each a list of (x, y) vertices) to add. |
| Returns | None | |
| Complexity | O(n) where n = total vertices across all polygons |
ClearedArea with bulk polygon insertion via cut — cleared region in blue, remaining area in red
cut_area()
cut_area(
c1: tuple[float, float],
c2: tuple[float, float],
radius: float,
) -> float
Incremental cut area when the tool moves from c1 to c2.
Computes the fresh material area inside the disk at c2 that is not already cleared (crescent area).
| Parameter | Type | Description |
|---|---|---|
c1 | tuple[float, float] | Previous centre (x, y). |
c2 | tuple[float, float] | Next centre (x, y). |
radius | float | Disk radius (mm). |
| Returns | float | Fresh cut area (mm²). |
cut_fast()
cut_fast(
polygons: Sequence[Sequence[tuple[float, float]]],
) -> list[list[tuple[float, float]]]
Add polygons, returning only the newly-added portion. Faster than cut when inputs don't overlap
existing fragments (skips the full union).
O(n) when inputs are disjoint from existing fragments
| Parameter | Type | Description |
|---|---|---|
polygons | Sequence[Sequence[tuple[float, float]]] | List of polygons to add. |
| Returns | list[list[tuple[float, float]]] | List of polygons representing the newly-added portion. |
| Complexity | O(n log n) worst case when union required, |
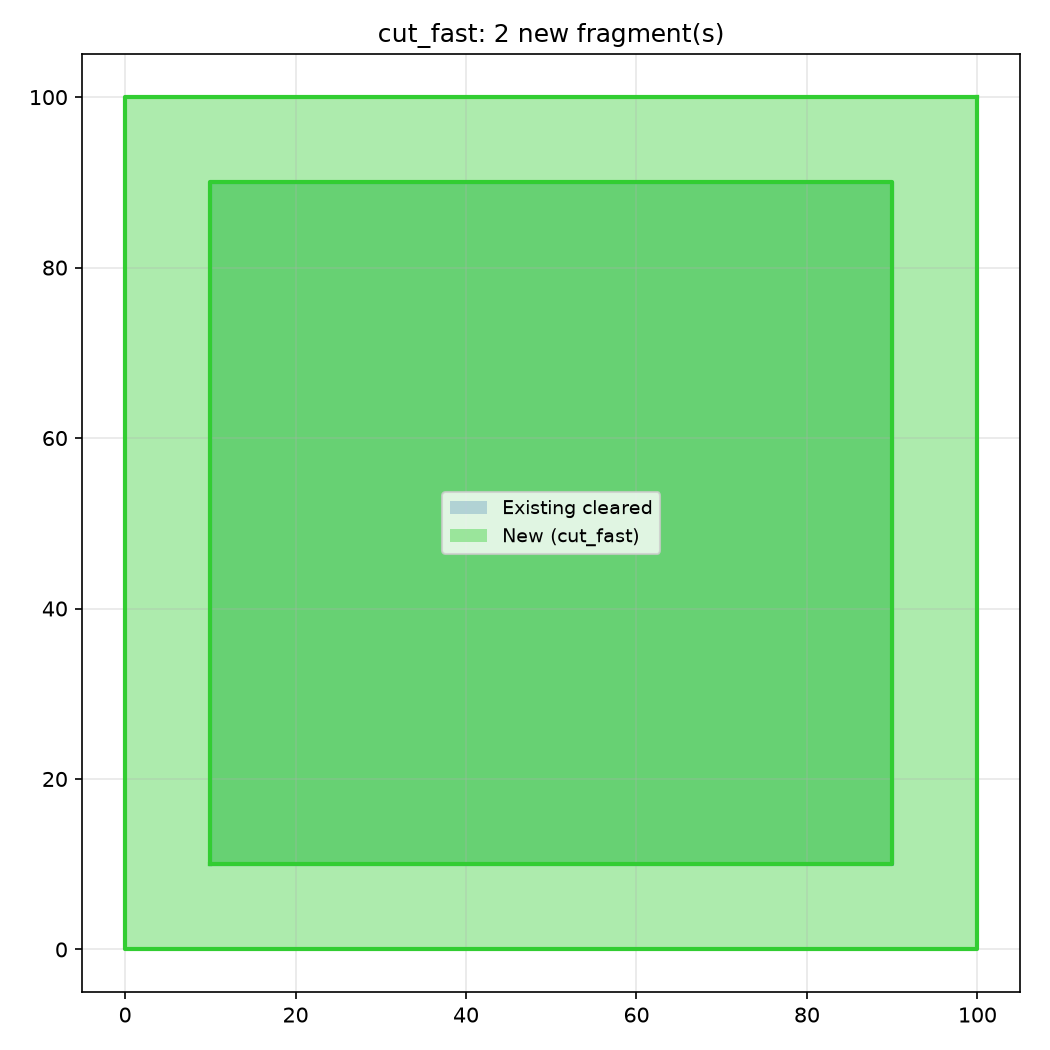
cut_fast adds polygons to the cleared state while returning only the newly-covered region (shown
in green).
envelope()
envelope(tool_radius: float) -> list[list[tuple[float, float]]]
The tool-centre envelope (inset of boundary by tool_radius, minus islands).
| Parameter | Type | Description |
|---|---|---|
tool_radius | float | Tool radius (mm). |
| Returns | list[list[tuple[float, float]]] | List of polygons representing the tool-centre envelope. |
expand()
expand(path: Sequence[tuple[float, float]], radius: float) -> None
Sweep a disk along a polyline, adding the swept area to the cleared set.
| Parameter | Type | Description |
|---|---|---|
path | Sequence[tuple[float, float]] | List of (x, y) points forming the polyline. |
radius | float | Disk radius (mm). |
| Returns | None | |
| Complexity | O(n) where n = number of path points |
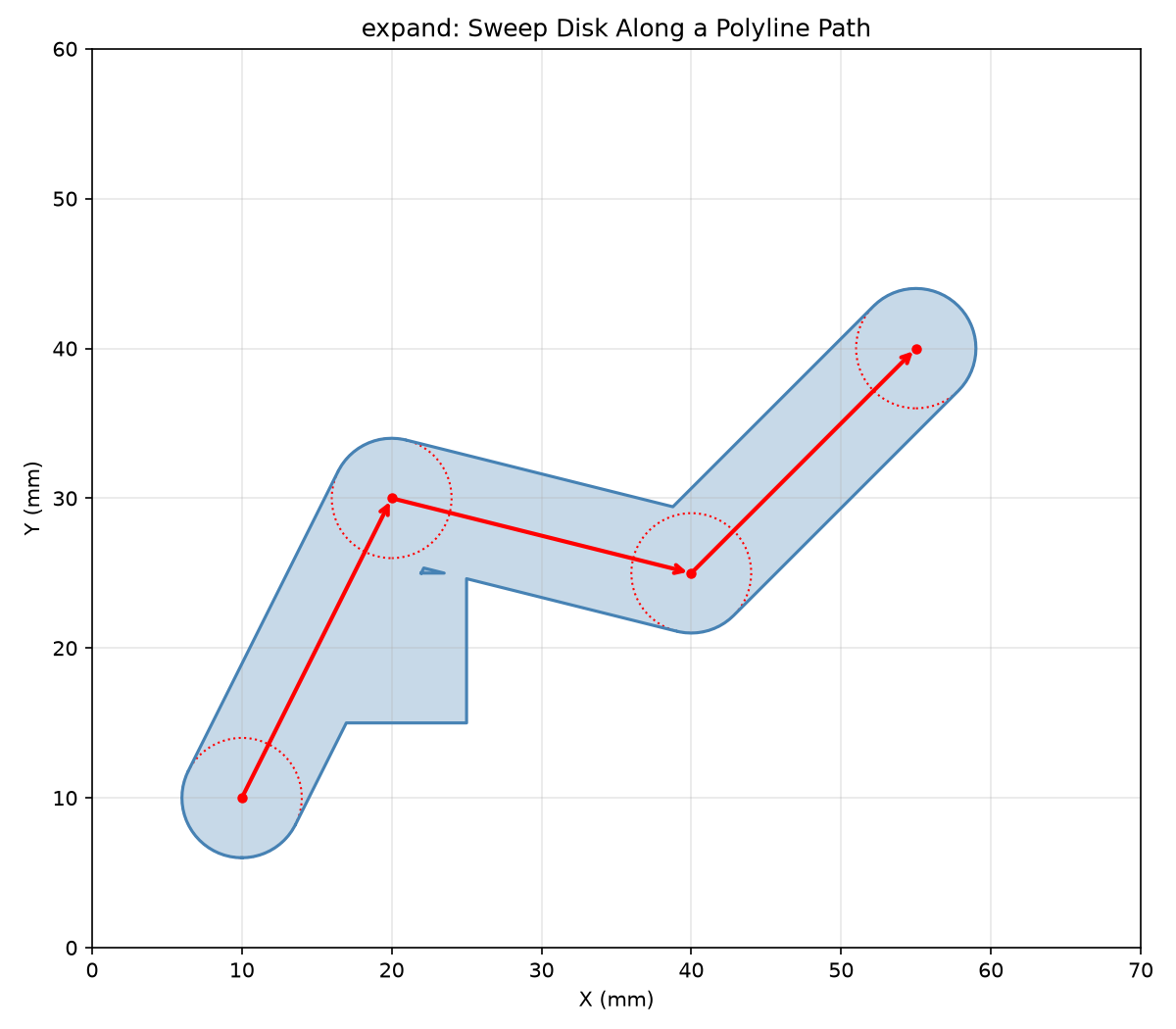
expand: sweeping a disk along a multi-segment path enlarges the cleared area.
expand_batched()
expand_batched(
prev: tuple[float, float],
next: tuple[float, float],
radius: float,
) -> None
Queue a single‑segment expansion into the current batch.
The segment swept polygon is stored in the internal buffer. Does not perform a union until
commit_batch is called.
.. warning::
Panics if `begin_batch` was not called first.
| Parameter | Type | Description |
|---|---|---|
prev | tuple[float, float] | Start point (x, y) of the segment. |
next | tuple[float, float] | End point (x, y) of the segment. |
radius | float | Disk radius (mm). |
| Returns | None |
expand_step()
expand_step(
prev: tuple[float, float],
next: tuple[float, float],
radius: float,
) -> None
Expand the cleared area by sweeping a disk of radius along a single segment from prev to next.
| Parameter | Type | Description |
|---|---|---|
prev | tuple[float, float] | Start point (x, y) of the segment. |
next | tuple[float, float] | End point (x, y) of the segment. |
radius | float | Disk radius (mm). |
| Returns | None |
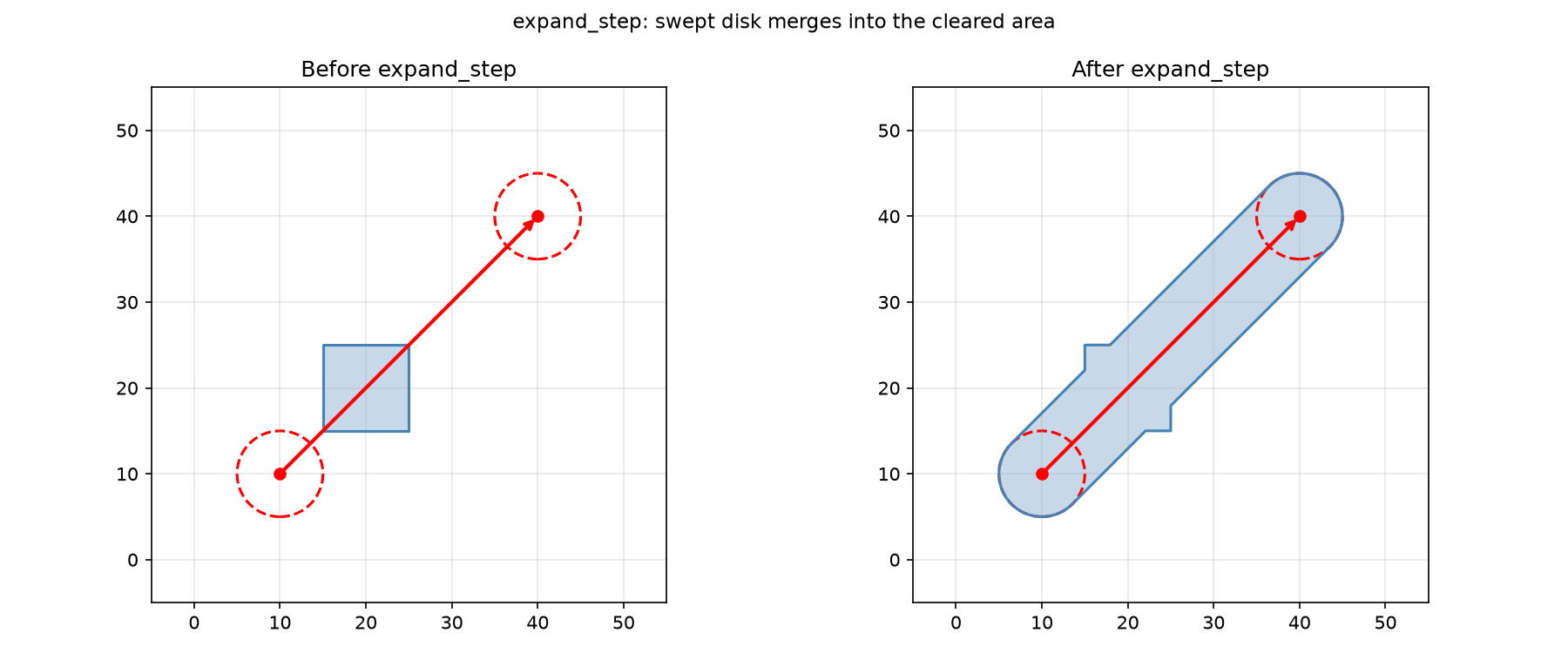
expand_step: sweeping a disk (dashed circle) of radius radius from prev to next (red arrow)
enlarges the cleared area (right) vs the initial state (left).
fragments()
fragments() -> list[list[tuple[float, float]]]
Return the union of all polygons currently tracked as cleared.
Each fragment is a closed polygon (list of (x, y) vertices) representing an area that has already
been cut. The fragment set grows as cut_fast or cut are called.
This is useful for inspecting which areas have been cleared.
| Parameter | Type | Description |
|---|---|---|
| Returns | list[list[tuple[float, float]]] | List of polygons representing the cleared fragments. |
| Complexity | O(m) where m = number of fragments |
frontier()
frontier(simplify_tol: float) -> list[list[tuple[float, float]]]
Return a unioned, simplified snapshot of the current outer boundary, clipped to the stock.
| Parameter | Type | Description |
|---|---|---|
simplify_tol | float | Tolerance in mm for polyline simplification. |
| Returns | list[list[tuple[float, float]]] | List of polygons representing the outer boundary. |
| Complexity | O(n log n) |
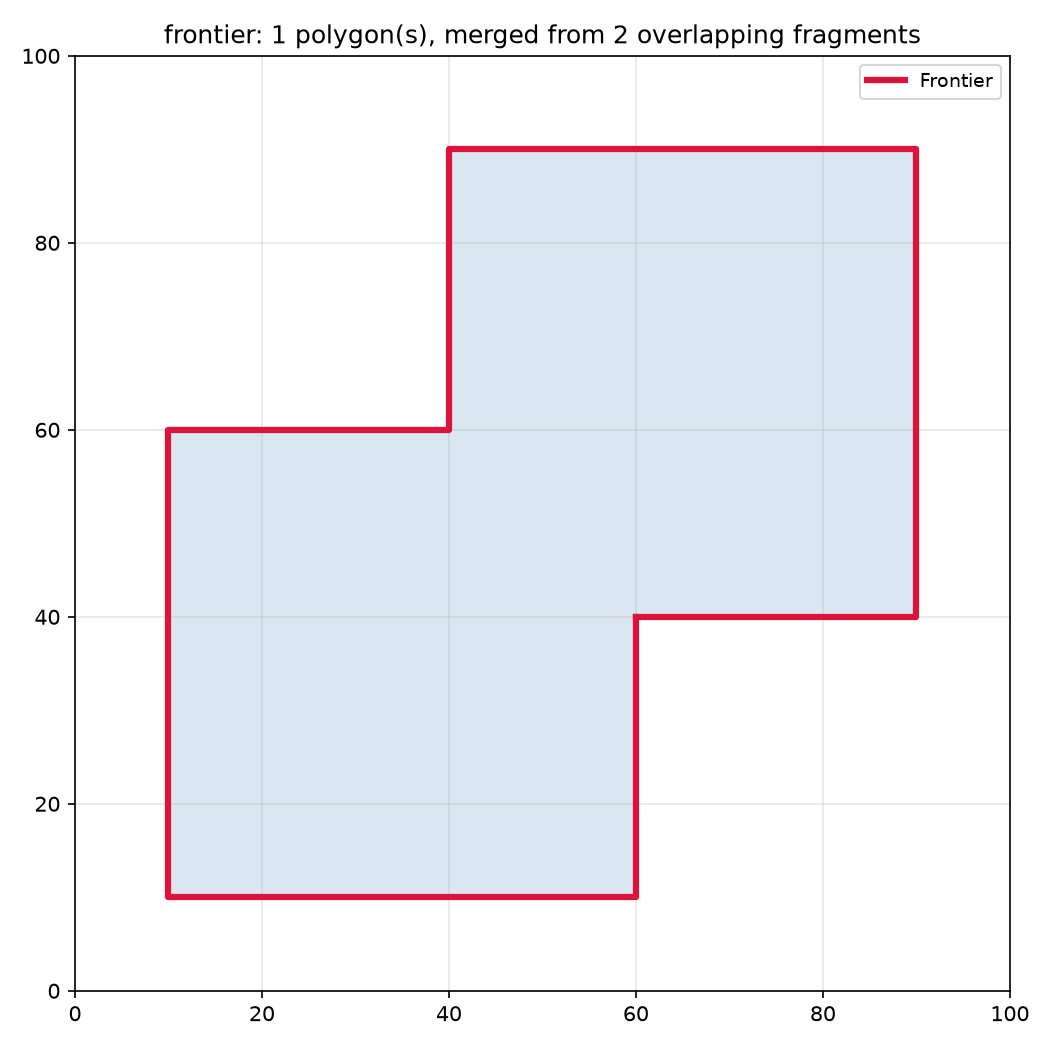
frontier returns the outer boundary of the cleared area after merging overlapping fragments —
shown in crimson.
is_empty()
is_empty() -> bool
True when no fragments have been recorded.
| Parameter | Type | Description |
|---|---|---|
| Returns | bool | True if no fragments have been recorded. |
path_engagement()
path_engagement(
path: Sequence[tuple[float, float]],
radius: float,
) -> list[tuple[float, float, float]]
Evaluate engagement along a polyline.
| Parameter | Type | Description |
|---|---|---|
path | Sequence[tuple[float, float]] | List of (x, y) points. |
radius | float | Disk radius (mm). |
| Returns | list[tuple[float, float, float]] | List of (angle, area, chord_depth) tuples. |
point_engagement()
point_engagement(
center: tuple[float, float],
radius: float,
) -> tuple[float, float, float]
Evaluate engagement at a point using the signed distance to this cleared area's boundary.
| Parameter | Type | Description |
|---|---|---|
center | tuple[float, float] | Query point (x, y). |
radius | float | Disk radius (mm). |
| Returns | tuple[float, float, float] | (angle_rad, area, chord_depth). |
query_window()
query_window(
bbox: tuple[float, float, float, float],
) -> list[list[tuple[float, float]]]
Return fragments whose bounding box overlaps the query window.
k = output vertices
| Parameter | Type | Description |
|---|---|---|
bbox | tuple[float, float, float, float] | Bounding box (x_min, y_min, x_max, y_max). |
| Returns | list[list[tuple[float, float]]] | Fragments intersecting the bounding box. |
| Complexity | O(m + k) where m = number of fragments, |
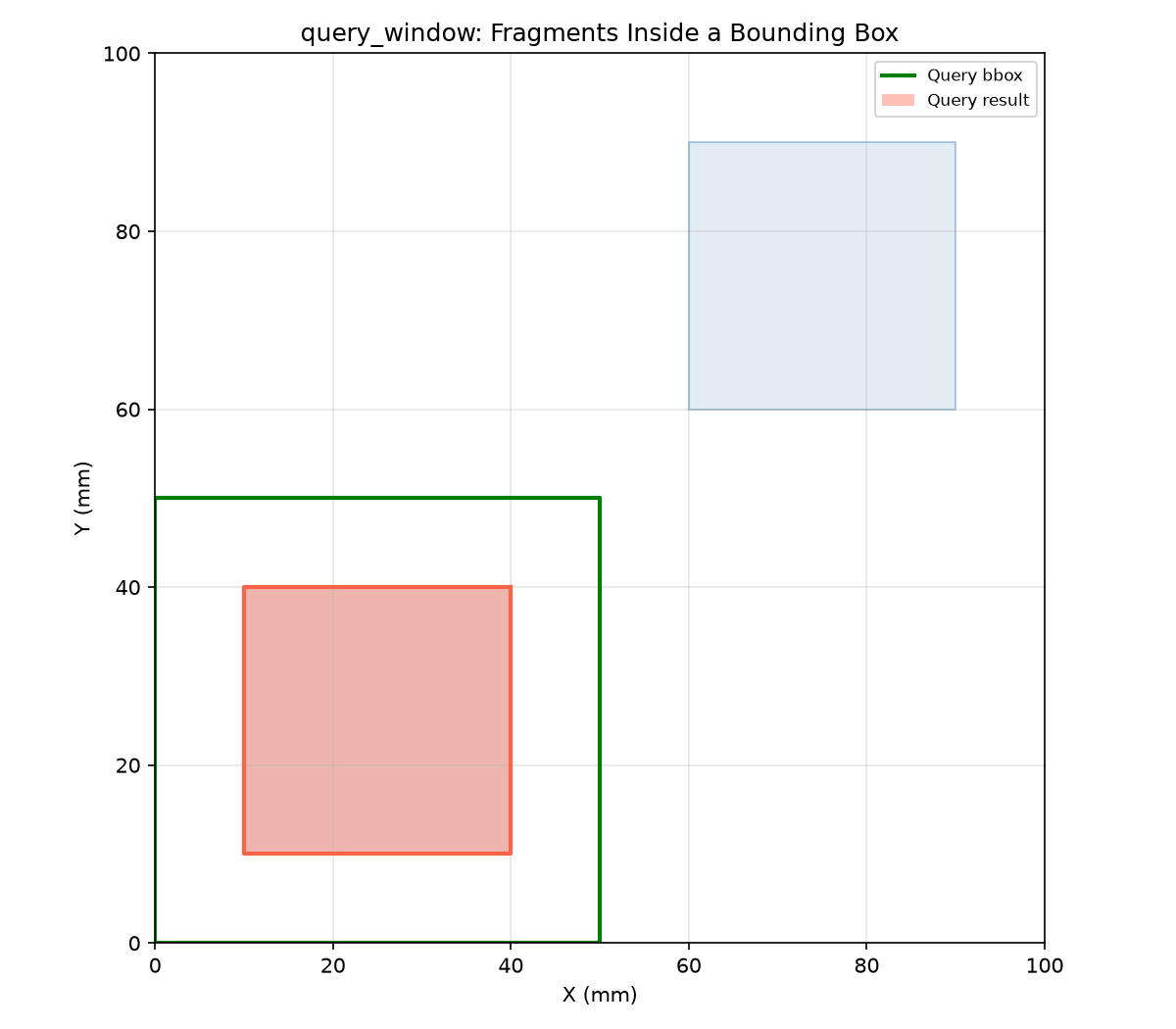
query_window returns only the cleared fragments whose bounding box overlaps the query (green
box).
remaining()
remaining() -> list[list[tuple[float, float]]]
Subtract cleared fragments from the stock, returning the uncut portion.
| Parameter | Type | Description |
|---|---|---|
| Returns | list[list[tuple[float, float]]] | List of polygons representing the uncut portion. |
| Complexity | O(n * m) where n = stock vertices, m = fragments |
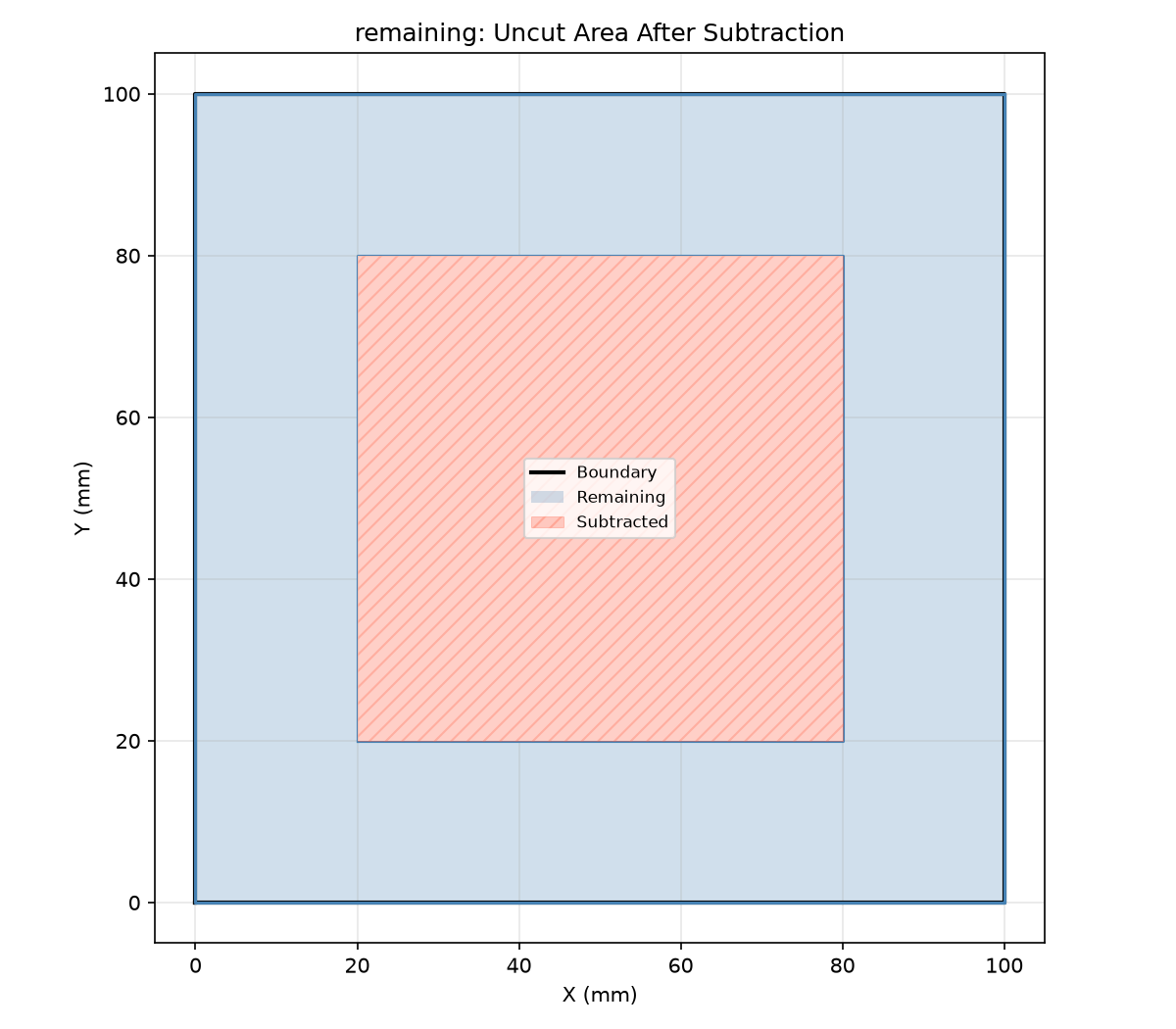
remaining subtracts cleared fragments from the boundary polygon, returning the uncut region
(red).
signed_boundary_distance()
signed_boundary_distance(x: float, y: float) -> float
Signed perpendicular distance to the nearest cleared boundary.
Returns positive when the point is outside the cleared area (in uncut material), negative when inside.
| Parameter | Type | Description |
|---|---|---|
x | float | X coordinate of the query point. |
y | float | Y coordinate of the query point. |
| Returns | float | Signed distance in mm. 0.0 means exactly on the boundary. |
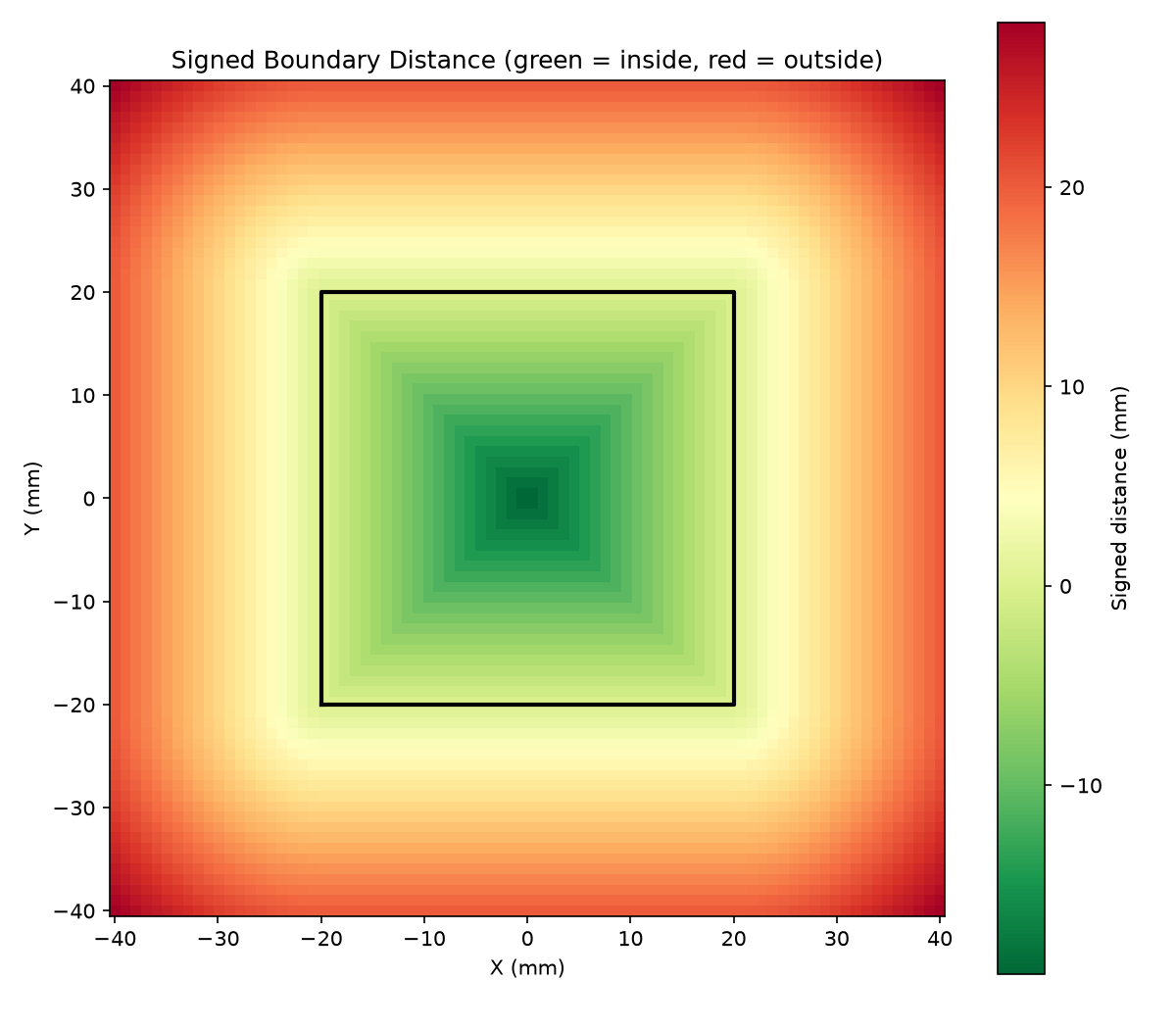
Signed boundary distance around a cleared square: green = inside cleared, red = outside.
total_area()
total_area() -> float
Total cleared area.
| Parameter | Type | Description |
|---|---|---|
| Returns | float | Total cleared area in mm². |
| Complexity | O(1) |